управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

-dv*xdx,
САУ создаются, как правило, на основе использования: крыльча- i ых движителей (КД), поворотных винтовых колонок (ПВК) и раздельных поворотных насадок (РПН). Рассмотрим кратко принцип действия перечисленных устройств. Крыльчатый движитель представляет несколько (4—8) одинаковых поворотных вертикальных лопастей, расположенных на равных расстояниях по окружности вращающегося диска, установленного заподлицо
 в) ДП д) дп S) дп г) дп д) ап Рис. 6.1. Направление силы упора крыльчатого движителя Р в зависимости от положения центра управления N относительно центра диска О: а — вперед; 6 — вперед и влево; в — вперед и вправо; г — нулевой^ упор; д — назад благодаря чему углы атаки изменяются в зависимости от угла поворота диска. Принцип действия КД поясняется на рис. 6.1. В процессе вращения диска каждая лопасть разворачивается перпендикулярно к линии, соединяющей середину хорды лопасти с точкой N. Эта точка называет- ся центром управления. Угол атаки каждой лопасти за время оборота диска непрерывно меняется, достигая максимального значения, когда лопасть находится на радиусе, перпендикулярном ON. Поэтому суммарная сила упора лопастей Р направлена по этому радиусу. Абсолютное значение углов атаки, а значит и сила упора увеличиваются с увеличением расстояния центра управления от центра диска О, т. е. с увеличением эксцентриситета. Система управления лопастями КД позволяет устанавливать центр управления N в любое фиксированное относительно судовых осей положение, т. е. без реверсирования создавать упор в любом направлении и изменять его величину. КД применяется как в качестве ГДРУ (буксиры, паромы, плавкраны и т. п.), так и в качестве вспомогательного средства управления — ПУ на морских судах. В последнем случае КД располагается обычно в поперечном канале, расположенном ниже ватерлинии, в корпусе судна. На рис. 6.2 показан пример использования КД в качестве ГДРУ на портовом буксире. Поворотные винтовые колонки представляют собой гребной винт (иногда в комплексе с насадкой), направление тяги которого может изменяться на 360° за счет поворота относительно вертикальной оси. ПВК могут быть главными движителями или вспомогательными. В первом случае они относятся к ГДРУ, во втором — к ВДРУ. 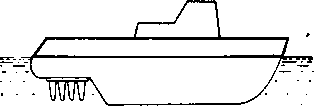 Как ГДРУ, поворотные винтовые колонки применяются на судах, к управляемости которых предъявляются особенно высокие требования, но скорость которых невелика (плавкраны, портовые буксиры, пожарные суда и т. д.). Как ГДРУ, поворотные винтовые колонки применяются на судах, к управляемости которых предъявляются особенно высокие требования, но скорость которых невелика (плавкраны, портовые буксиры, пожарные суда и т. д.).Рис. 6.2. Пример использования КД в качестве ГДРУ на портовом буксире \ ■ i V ш i' Рис. 6.3. Схема действия раздельных поворотных насадок (РПН): а — перекладка РПН внутрь; б — перекладка РПН наружу В качестве ВДРУ ПВК чаще всего применяются на судах, на ко- торых по условиям эксплуатации необходимо длительное время удер- живаться на постоянном курсе и (или) в заданной точке (например, научно-исследовательские судна, кабелеукладчики, плавучие буровые установки и т. п.). ПВК, используемые как ВДРУ, выполняются, как правило, откид- ными либо выдвижными, что позво- ляет во время перехода убрать их внутрь корпуса для уменьшения со- противления. Частным случаем ПВК являет- ся активный руль (АР), представ- ляющий собой сочетание обычного руля с небольшим гребным винтом, установленным за задней кромкой пера руля. Такой винт обычно снаб- жается направляющей насадкой для повышения КПД. Винт АР при- водится во вращение электродвигателем, вмонтированным в перо руля и закрытым грушевидным обтекателем. Перо руля с установленным на нем винтом АР поворачивается обычной рулевой машиной, но предель- ные углы перекладки для повышения эффективности АР увеличивают- ся до 70—90°. АР позволяет разворачивать судно при отсутствии хода, а также осуществлять маневрирование без работы главного движителя на стес- ненной акватории. При этом скорость судна можно изменять от нуля до 3—4 уз при полном сохранении управляемости. Раздельные поворотные насадки по своей форме не отличаются от обычных поворотных винтовых насадок. Они устанавливаются на двух- винтовых судах и имеют конструкцию привода, позволяющую выпол- нять раздельную их перекладку. РПН имеют широкое применение на речных транспортных судах и судах смешанного плавания, на буксирах-толкачах, а также на морских буксирах-кантовщиках. РПН при работе винтов враздрай позволяет создавать значитель- ную боковую тягу при отсутствии хода, что показано на рис. 6.3. Если обе направляющие насадки переложены внутрь (см. рис. 6.3, а), то равнодействующая тяг винтов, приложенная за кормой, соз- дает большой момент и судно совершает быстрый разворот на месте. При перекладке насадок наружу точка приложения равнодействую- щей тяг смещается вперед от насадок (см. рис. 6.3/б). В зависимости от угла поворота насадок точка приложения может Находиться позади или впереди миделя, а в частном случае—на миделе. В этом послед- нем случае создается боковая тяга, и судно приобретает движение лагом. При работе винтов в одном направлении и совместной перекладке насадок в одну сторону РПН работает как обычное рулевое уст- ройство. 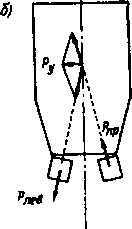
Общим признаком, характеризующим рассмотренные в п. 6.1 САУ, является способность создавать поперечную силу даже при полном отсутствии скорости судна по курсу. Точка приложения поперечной силы по длине судна зависит от места установки данного САУ. Исключением является РПН, позволяющие в зависимости от угла перекладки насадок приложить поперечную сипу к диаметральной плоскости в любой точке корпуса судна, а также за его пределами. Если же на судне установлены, например, две поворотные винтовые колонки или два подруливающих устройства —- носовое и кормовое, то совместное использование таких САУ тоже позволяет произвольно выбирать точку приложения поперечной силы, как и при использовании РПН. Характер поведения судна под воздействием САУ определяется расстоянием точки приложения поперечной силы Р„ от ЦТ судна, т. е. плечом .v„. Под влиянием момента поперечной силы Мр=Ру судно полу- чает вращательное движение. При этом тангенциальная скорость каж-| дой точки по длине судна определяется расстоянием этой точки от ПП и угловой скоростью судна. Распределение местных скоростей по длине судна при вращении вокруг ПП, расположенного на некотором расстоянии от ЦТ, показано на рис. 6.4. В одном случае (рис. 6.4,‘а) ПП расположен за корпусом судна на продолжении его ДП, а в другом (рис. 6.4, б) —в пределах корпуса судна. Напомним, что ПП называется точка на ДГ1, в которой угол дрейфа равен нулю. Когда вращение судна происходит относительно неподвижной точки ПП, лежащего на ДП, уравнения установившегося движения судна (по оси Y и вокруг оси Z) могут быть записаны в виде: ! Ry -Ри ; | Мщ'иР,Х, |