управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

ly sin (К -Т- 90°) /*з1п K-Jгде Хт — длина волны сравнения для данной пары, м;
Длины волн сравнения равны для: «зеленой» пары 1170 м, «красной» 880 м, «фиолетовой» 700 м. Для обсерваций при маневрировании достаточно использовать только две пары станций, гиперболы которых пересекаются под углом, близким к прямому. В процессе наблюдений следует в любой последовательности выполнить все те маневры, информация о которых включается в таблицу маневренных характеристик, а при наличии времени и благоприятных условий — также и другие маневры, дающие информацию для формуляра (см. п. 5.1). Для проведения траекторных измерений на мостике, кроме руководителя испытаний, должно находиться по одному наблюдателю у каждого из двух используемых фазометров, наблюдатель у тахометра, а также регистратор с секундомером и заранее подготовленными бланками для записи наблюдений. Регистратор по команде руководителя перед каждым маневром запускает секундомер и подает команды через интервалы в 15—30 с о снятии отсчетов в форме предварительной и исполнительной команды (голосом или свистком) и сразу же записывает на бланке отсчет времени по секундомеру, замеченный на момент отданной им команды, после чего вносит в бланк результаты измерений, сообщаемые наблюдателями в заранее установленной последовательности, например: курс судна (сообщает рулевой), отсчет «красного» фазометра, отсчет «зеленого» фазометра, частота вращения винта. Во избежание путаницы установленная последовательность сообщений должна строго соблюдаться. Чтобы не перегружать регистратора, наблюдатель у тахометра может снимать отсчеты оборотов через равные промежутки времени, например, через 10 или 15 с, руководствуясь отдельным сихронно пущенным в начале маневра секундомером, и записывать их на отдельном бланке, не передавая регистратору. Это позволит за счет облегчения работы регистратора сократить промежутки между траек- торными измерениями. После завершения всех испытаний результаты наблюдений по каждому маневру наносят на планшет и по полученным точкам проводят сглаженную линию, т. е. получают траекторию данного маневра. Средняя квадратическая погрешность траекторных измерений с помощью фазовой РНС <5-2> где 0 — угол между изолиниями (гиперболами), снимаемый с карты (планшета); du d2 — ширина дорожки в районе наблюдений, рассчитывается по формуле (5.1), м; тДф —средняя квадратическая погрешность измерения разности фаз (в долях фазового цикла). При наиболее благоприятных условиях измерений значение тдф может быть принято равным 0,03. Если еще принять значения фазовых углов Yi=s-yar=90° и угол между гиперболами 0=90°, то при использовании «красной» (Ят=880 м) и «зеленой» (А,т=П70 м) пар по формулам (5.1) и (5.2) получим: о.оз у М = Sin 90° В реальных же условиях измерений и при менее благоприятных значениях углов у и 0 погрешность траекторных измерений может оказаться в несколько раз больше. Кроме того, если в районе маневрирования действует неизвестное течение, то траектории маневров окажутся искаженными. Наблюдения с помощью РЛС. Данный способ основан на опреде* лениях места по пеленгу и дистанции относительно точечного ориентира, находящегося на воде. В качестве ориентира нужен предмет, хорошо отражающий радиоволны. Этому требованию удовлетворяют буй и веха, снабженные радиолокационным пассивным отражателем или металлическими предметами, его заменяющими. В качестве ориентира можно использовать и судовой рабочий плотик. Пеленги ориентира можно измерять как с помощью РЛС, так и визуально по оптическому пеленгатору. Визуальные пеленги несколько точнее радиолокационных. На мостике, кроме руководителя испытаний, должны находиться три наблюдателя: у РЛС, у пеленгатора, у тахометра, а также регистратор с секундомером и бланками для записи наблюдений. В процессе выполнения маневров через короткие по возможности промежутки времени (15—30 с) берут пеленги и дистанции ориентира по исполнительным командам руководителя или регистратора. Регистратор в момент команды замечает и записывает отсчет по секундомеру, а затем вносит в бланк сообщаемые наблюдателями отсчеты в заранее установленной последовательности, например: курс, пеленг, дистанция* Наблюдатель у тахометра со вторым секундомером ведет самостоятельные измерения с записью на отдельном бланке. Рекомендуется пускать секундомеры и начинать измерения еще до начала маневра. Несколько предварительных измерений позволят наблюдателям освоиться и войти в ритм, а полученные результаты дадут возможность впоследствии при прокладке проконтролировать надежность траекторных измерений в начале маневра, х В зависимости от того, какой маневр выполняется, регистратор должен фиксировать моменты отдельных событий, характеризующих данный маневр. При выполнении торможения с помощью реверса двигателя началом маневра считается момент передачи команды по машинному телеграфу. Затем нужно также зафиксировать момент начала снижения оборотов винта (начало пассивного периода), момент начала вращения винта назад (начало активного периода), а также момент полной остановки судна относительно воды (конец маневра). При выпол- тренированного наблюдателя 9,7 м, а для менее тренированных 10—10,7 м. 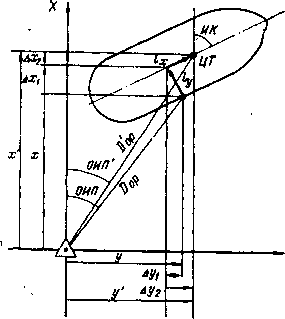 Для практического достижения высокой точности траекторных измерений следует перед началом испытаний на неподвижном судне тщательно измерить рулеткой высоту глаза наблюдателя с точностью 0,1 м, а маневры выполнять по-воз- можности ближе к плавающему ориентиру. Для практического достижения высокой точности траекторных измерений следует перед началом испытаний на неподвижном судне тщательно измерить рулеткой высоту глаза наблюдателя с точностью 0,1 м, а маневры выполнять по-воз- можности ближе к плавающему ориентиру.При измерении углов снижения рекомендуется использовать секстан с ночной трубой, дающей прямовидимое изображение и обладающей большим полем зрения, что облегчает процесс измерений. Рис. 5.2. Схема приведения обсерваций Обработка результатов наблю- к ЦТ судна, выполненных с крыла мос- дений. Вид результатов траектор- тнка ных измерений зависит от способа, с помощью которого они получены. При использовании РЛС результаты получаются в виде попарно измеренных пеленгов и дистанций плавающего ориентира. При этом пеленги взяты с правого или левого крыла мостика, а дистанции — от места расположения антенны РЛС. При наблюдениях по углу снижения результаты получаются в виде пеленгов и углов снижения плавающего ориентира, попарно измеренных приблизительно из одной точки правого или левого крыла мостика (наблюдатель с секстаном и наблюдатель у пеленгатора при наблюдениях находятся рядом). В таблице маневренных элементов должны быть даны траектории циркуляции ЦТ судна, который может находиться на значительном расстоянии от места выполнения измерений, поэтому перед прокладкой необходимо выполнить нужную аналитическую обработку измерений либо учесть несовпадение ЦТ и места измерений графически при выполнении прокладки (для маневров торможения судна приведение обсерваций к ЦТ особого значения не имеет). Следует заметить, что приведение к ЦТ обсерваций, полученных по фазовой РНС, нецелесообразно, так как измерения обычно содержат значительные погрешности, поэтому и конечные результаты не могут быть получены с высокой точностью. Сущность приведения обсерваций к ЦТ судна показана на рис. 5.2 применительно к измерениям обоих навигационных параметров с правого крыла. При аналитическом приведении к ЦТ рекомендуется одновременно переходить от полярных координат (/7ор, Doр) к прямоугольным (х, у). Начало координат в обоих случаях принимается в точке расположения плавающего ориентира, а ось X совпадает с направлением меридиана. В векторной форме процедура приведения обсерваций к ЦТ судна, выполненной с крыла мостика судна, имеет вид D'op 7х» (5.7) где Пор — вектор положения крыла мостика, имеющий модуль, равный измеренному расстоянию D0p, и направление, равное обратному пеленгу (П 4-180°); 1У — вектор расстояния от крыла до ДП, имеющий направление, равное К±90® (знак «—» относится к случаю измерений с правого крыла); ±7* — вектор расстояния от мостика до ЦТ, направление которого равно К (знак «+» относится к случаю, когда ЦТ располагается в нос от мостика судна); D^p — вектор положения ЦТ судна относительно начала координат. Суммы проекций указанных векторов на координатные оси дают прямоугольные координаты ЦТ судна, численные значения которых рассчитываются по формулам: х' = дс-Ь Д*1 d= Дх,; у' = у+ Ьух ± Ду%, или в развернутом виде: X* =Dopcos (П+ 180°) 4- ly cos (К =F 90°) ± /*cos К; j g yf = Z^op (П4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Номера обсерваций | Время от начала маневра, мин, с | < ш £ * | П. град | » *•! « . х . | ДК. град | 3 о. о Q | Прямоугольные координаты, приведенные к ЦТ | п, об/мин | Примечание | |
| Xя, Кб | у\ Кб | |||||||||
| 1 | —1,54 | 180 | 170 | 0*49' | 0 | 7,03 | 6,78 | — 1 ,28 | 25 | Измерения с лево |
| 2 | —1,38 | 181 | 169 | 0 56 | 1 | 5,25 | 6,00 | — 1,25 | 97 | го крыла мостика |
| 3 | — 1,17 | 181 | 166 | 1 03 | 1 | 5,63 | 5,33 | — 1,42 | 95 | |
| 4 | —0,41 | 180 | 160 | 1 37,5 | 0 | 3,79 | 3,42 | -1,36 | 96 | |
| 5 | —0,26 | 180 | 156 | 1 58 | 0 | 3,17 | 2,76 | — 1,35 | 97 | |
| 6 | 0,00 | 180 | 142 | 3 03,5 | 0 | 2,09 | 1,51 | — 1,34 | 96 | Право на борт |
| 7 | 0,22 | 192 | 114 | 4 23,8 | 12 | 4,47 | 0,48 | — 1,43 | 93 | |
| 8 | 0,40 | 215 | 82 | 4 30 | 35 | 4,44 | —0,28 | — 1,55 | 94 | |
| 9 | 0,56 | 238 | 66 | 3 17,2 | 58 | 1,95 | —0,81 | —1,93 | 93 | |
| 10 | 1,28 | 281 | 66 | 2 4,3 | 101 | 3,02 | —1,26 | —2,91 | 97 | Измерения с пра |
| 1! | 1,47 | 304 | 70 | I 47,2 | 124 | 3,47 | —1,16 | —3,41 | 98 | вого крыла мости |
| 12 | 2,12 | 333 | 78 | 1 27,8 | 158 | 4,17 | —0,77 | —4,20 | 98 | ка |
| 13 | 2,35 | 0 | 85 | 1 22,5 | 180 | 4,42 | —0,25 | --4,46 | 98 | |
| 14 | 3,07 | 37 | 96 | 1 18,8 | 217 | 4,61 | 0,62 | —4,54 | 98 | |
| 15 | 3,24 | 67 | 104 | 1 23,6 | 247 | 4,36 | 1,16 | —4,13 | 98 | |
| 16 | 3,52 | 88 | 109 | 1 32 | 268 | 4,00 | 1,37 | —3,64 | 98 | |
| 17 | 4,17 | 115 | 113 | 1 48,5 | 295 | 3,43 | 1,33 | —3,01 | 98 | |
| 18 | 4,53 | 156 | 112 | 2 30 | 336 | 2,53 | 0,80 | —2,34 | 98 | Измерения с лево |
| 19 | 5,08 | 173 | 106 | 2 51,2 | 353 | 2,23 | 0,47 | —2,19 | 98 | го крыла мостика |
| 20 | 5,25 | 191 | 93 | 3 11,5 | 271 | 2,00 | —0,02 | —2,08 | 98 | |