управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость Управляемость зависит как от свойств самого судна, определяемых комплексом корпус — рулевое устройство — винт и скоростью, так и от внешних условий: ветра, волнения, глубины и рельефа дна при плавании на мелководье, глубины и ширины канала при плавании в узкосшх. Следует особо остановиться на оценке влияния скорости судна на его управляемость, гак как это влияние проявляется неоднозначно. Гидродинамические силы и моменты на руле и корпусе судна пропорциональны квадрату скорости набегающего потока, поэтому при движении судна с установившейся скоростью независимо от ее ибсо- лютного значения, соотношения между указанными силами и моментами остаются постоянными. Следовательно, на разных установившихся скоростях траектории (при одинаковых углах перекладки руля) сохраняют свою форму и размеры. Но если в процессе маневра изменить частоту вращения винта, то изменится скорость потока, набегающего на руль, расположенный за винтом. При этом момент, создаваемый рулем, изменится сразу же, а гидродинамический момент на корпусе судна будет изменяться медленно по мере изменения скорости самого судна, поэтому прежнее соотношение между этими моментами временно нарушится, что приведет к изменению кривизны траектории. При увеличении частоты вращения винта кривизна траектории увеличится (радиус кривизны уменьшится), и наоборот. Когда скорость судна придет в соответствие с новой частотой вращения винта, кривизна траектории снова станет равной первоначальному значению. Все сказанное выше справедливо для случая штилевой погоды. Если же судно подвергается воздействию ветра определенной силы, то в этом случае управляемость существенно зависит от скорости судна: чем скорость меньше, тем больше влияние ветра на управляемость. Управляемость характеризуется главным образом двумя свойствами судна: устойчивостью на курсе и поворотливостью. Устойчивость. Устойчивостью на курсе называется способность судна сохранять направление прямолинейного движения. Различают два вида устойчивости: собственную и эксплуатационную. Собственная устойчивость—это способность судна, получившего под влиянием какого-то возмущения некоторую угловую скорость, постепенно снова приходить в прямолинейное движение (на новом курсе) без помощи рулевого устройства. Суда, не обладающие собственной устойчивостью, имеют свойство после прекращения внешнего воздействия без помощи руля вписываться в самопроизвольный поворот большей или меньшей кривизны. Направление поворота определяется направлением первоначального возмущения. Большинство судов собственной устойчивостью не обладают, т. е. являются в большей или в меньшей степени неустойчивыми. Эксплуатационная устойчивость — это способность судна сохранять заданное направление движения с помощью периодических перекладок руля. Очевидно, что эксплуатационной устойчивостью должно обладать каждое судно, но характеристики реальных судов в этом отношении различны, кроме того, у каждого судна эксплуатационная устойчивость зависит от его осадки и дифферента. Эксплуатационная устойчивость зависит как от степени собственной устойчивости судна, так и от эффективности рулевого устройства. Степень эксплуатационной устойчивости может характеризоваться отношением среднего значения угла отклонения судна от заданного курса к среднему значению требуемых углов перекладки руля, а также количеством требуемых перекладок в единицу времени. По таким характеристикам суда могут сравниваться между собой, однако единого критерия для оценки эксплуатационной устойчивости судов пока не установлено. ' Поворотливость. Под поворотливостью подразумевается способность судна изменять направление движения и описывать траекторию заданной кривизны. При отсутствии ветра и других внешних воздействий поворотливость определяется характеристиками средства управления и характеристиками корпуса судна (включая его посадку). Из рассмотренного выше видно, что устойчивость судна на курсе и его поворотливость являются противоположными качествами: при улучшении устойчивости на курсе поворотливость ухудшается, и наоборот. В.то же время оба этих качества являются полезными, поэтому при проектировании судов стремятся найти в зависимости от типа и назначения судна целесообразное сочетание этих качеств. Процесс поворота судна с переложенным рулем называется циркуляцией. Траектория, описываемая судном под влиянием переложенного на определенный угол руля, характеризуется радиусом циркуляция /?ц. Поскольку при прямолинейном движении /?ц= оо, то очевидно, что после перекладки руля радиус Rn начинает уменьшаться. После окончания переходного процесса траектория судна по форме приближается к окружности, т. е. радиус приобретает установившееся значение #ц = /?Уст, так как линейная и угловая скорости, отношением которых определяется значение радиуса, становятся приблизительно постоянными. Для сопоставимости поворотливости различных судов радиус циркуляции выражают в безразмерном виде (2.1) где R — относительный радиус; L — длина судна. Величина, обратная радиусу, называется кривизной. Ее также удобно выражать в безразмерном виде (22)
где W — относительная кривизна траектории или безразмерная угловая скорость; с*»уст — установившаяся угловая скорость, рад/с; Ууст — установившаяся линейная скорость судна, м/с. Диаграмма управляемости. В качестве важного критерия уп- равляемости судна на тихой воде в теории корабля используется зависимость относительной кривизны траектории от угла перекладки руля (D=/(6P) при установившейся циркуляции. Графическое изображение этой зависимости называют обычно диаграммой управляемости. На рис. 2.1 приведен пример диаграммы управляемости для судна, обладающего собственной устойчивостью на курсе. У такого судна каждому значению угла перекладки руля (на правый или на левый борт) соответствует единственное значение относительной кривизны траектории установившейся циркуляции. Если судно обладает симметричной управляемостью вправо и влево, то кривая ш(6Р) проходит через начало координат. Если же управляемость несимметрична, что нередко встречается на одновинтовых судах, то кривая о(бр) оказывается смещенной вправо или влево, а точка пересечения кривой с горизонтальной осью указывает требуемое среднее положение руля, при котором обеспечивается прямолинейное движение судна. 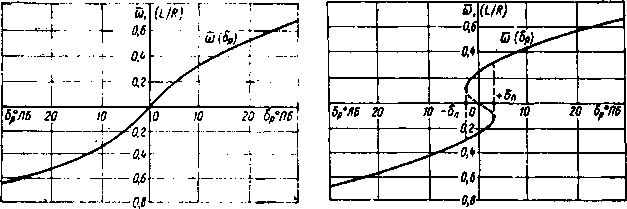 Рис. 2.1. Диаграмма управляемости судна, обладающего собственной устойчивостью на курсе Рис. 2.2. Диаграмма управляемости судна, не обладающего собственной устойчивостью на курсе На рис. 2.2 показана диаграмма управляемости судна, не обладающего собственной устойчивостью на курсе. Такое судно имеет свойства вписываться в самопроизвольную циркуляцию при прямом положении руля. Как показывает диаграмма (см. рис. 2.2), судно при прямом положении руля разворачивается вправо по траектории с кривизной -fa) либо влево с кривизной —о. Для того чтобы в этом состоянии прекратить самопроизвольную циркуляцию, например, вправо, необходимо переложить руль влево на угол — 6л, а для прекращения левой циркуляции необходима перекладка руля вправо на угол +6П. Углы перекладки руля +бп и — бл называются предельными углами обратной поворотливости. При перекладках руля на указанные углы направление поворота меняется на обратное. Площадь на диаграмме управляемости, ограниченная вертикальными прямыми, проведенными через точки +бп и —бл, и участками ветвей диаграммы, называется зоной неустойчивости. В пределах этой зоны каждому углу перекладки руля соответствуют две траектории с кривизной разного знака. По каждой из этих траекторий судно способно совершать устойчивое движение. Каждому углу перекладки в пределах зоны соответствует еще одна траектория, кривизна которой определяется штриховой линией (см. рис. 2.2). Однако движение по этой траектории не является устойчивым. Для его поддержания необходимо непрерывное регулирование за счет перекладок руля. Изложенное выше показывает, что диаграмма управляемости дает информацию не только о поворотливости, характеризуемой кривизной траектории, но также и об устойчивости на курсе. Следует отметить, что иногда по вертикальной оси диаграммы откладывают непосредственно угловую скорость (например, град/с) и вместо кривой <о(6р) строят кривую соуСт(бр). Однако в этом случае диаграмма не дает непосредственной информации о кривизне траектории, так как угловая скорость зависит не только от угла перекладки руля, но и от линейной скорости судна.
За начало циркуляции принимается момент начала перекладки руля. Циркуляция характеризуется линейной и угловой скоростями, радиусом кривизны и углом дрейфа. Эти характеристики не остаются постоянными. Процесс циркуляции принято делить на три периода. Первый период — маневренный, продолжается в течение времени перекладки руля. Второй период — эволюционный, начинается с момента окончания перекладки руля и заканчивается, когда характеристики циркуляции примут установившиеся значения. Третий период — установившийся, начинается с момента окончания второго периода и продолжается до тех пор, пока руль остается в переложенном положении. Переложенный на угол 6Р руль, как и всякое крыло, развивает подъемную силу — боковую силу руля Яру. Для получения наглядного представления о воздействии силы на корпус судна приложим в его ЦТ две силы, равные по модулю силе Рру и направленные в противоположные стороны, как это показано на рис. 2.3. Эти две силы взаимно компенсируются, т. е. не оказывают влияния на корпус судна, но их совместное рассмотрение с боковой силой руля Рру позволяет понять, что корпус судна одновременно испытывает поперечную силу Рру, приложенную в центре тяжести G, и момент боковой силы руля Мр относительно вертикальной оси Z, проходящей через ЦТ. В первый период после начала циркуляции под влиянием поперечной силы Рру ЦТ судна приобретает боковое перемещение во внешнюю сторону циркуляции — обратное смещение. Возникает угол дрейфа а, а значит и поперечная гидродинамическая сила на корпусе RVt направленная внутрь циркуляции. Ее точка приложения в соответствии со свойствами крыла смещена в нос от ЦБС, положение которого при отсутствии большого дифферента можно считать совпадающим с ЦТ судна. Момент силы Rv—Мя в этом первоначальном периоде циркуляции имеет тот же знак, что и момент руля Мр, поэтому появляется и начинает быстро возрастать угловая скорость. В дальнейшем под влиянием поперечной силы /?у траектория ЦТ начинает постепенно искривляться в сторону перекладки руля, т. е. радиус циркуляции, который в начале стремился к бесконечности, начинает уменьшаться. 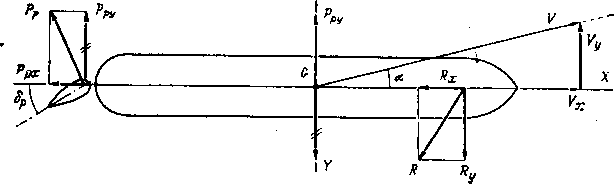 Рис. 2.3. Силы, действующие на судно с переложенным рулем в начальной стадии циркуляции 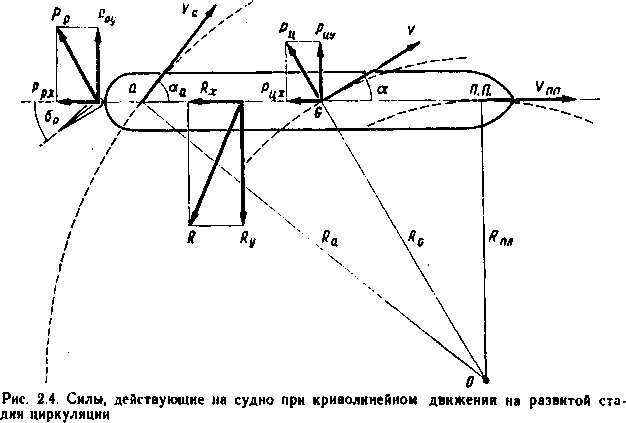 При движении ЦТ по криволинейной траектории с радиусом Re. каждая точка по длине судна описывает относительно общего центра циркуляции О свою траекторию, радиус кривизны которой отличается от Rq (рис. 2.4). При этом каждая такая точка имеет свой угол дрейфа, значение которого возрастает по мере удаления в сторону кормы. В нос от ЦТ углы дрейфа соответственно уменьшаются. Если из центра циркуляции О опустить перпендикуляр на ДП, то в полученной точке ПП угол дрейфа равен нулю. Эта точка носит название центра вращения или полюса поворота (ПП). Полюс поворота при циркуляции для большинства судов располагается вблизи носовой оконечности на расстоянии примерно 0,4 длины судна от ЦТ, принимаемого на мидель-шпангоуте. Угол дрейфа ЦТ судна на циркуляции: a = arctg-k*-, (2.3) *чт где Inn — расстояние ПП от центра тяжести. Для произвольной по длине судна точки а угол дрейфа: «о«arctg "оп где /« — расстояние точки а от ЦТ (в нос знак «+», в корму «—*). На небольшом участке корпуса от ПП до носового перпендикуляра поток воды набегает на корпус со стороны внутреннего борта, поэтому углы дрейфа на этом участке имеют знак, противоположный углам дрейфа на участке от ПП до кормового перпендикуляра, на котором поток воды набегает со стороны-внешнего борта. Под углом дрейфа на циркуляции подразумевается угол дрейфа ЦТ судна На судах, имеющих крутую циркуляцию, угол дрейфа может достигать 20° и более. 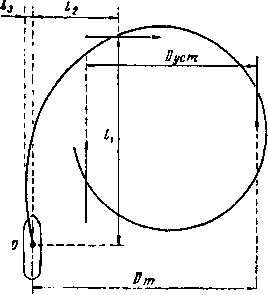 Рис. 2.5. Типичная траектория циркуляции с рулем на борту Как уже отмечалось (см. 1.1), поперечная сила пропорциональна углу атаки, а так как углы дрейфа возрастают по длине корпуса в сторону кормы, то точка приложения поперечной гидродинамической силы /?у, т. е. равнодействующей элементарных поперечных сил, распределенных по корпусу, по мере искривления траектории смещается в сторону кормы, а момент силы Мд, постепенно уменьшаясь, в конце концов меняет знак и начинает действовать противоположно моменту руля Мр, т. е. становится демпфирующим. Рост угловой скорости при этом замедляется, а когда моменты Mv и MR становятся равными по абсолютной величине, угловая скорость стремится к установившемуся значению соуСт. При движении по криволинейной траектории возникает центробежная сила Рц, приложенная к ЦТ судна и направленная по радиусу циркуляции во внешнюю сторону. Благодаря наличию угла дрейфа эта сила имеет продольную Рпх и поперечную Рцу составляющие. Из-за лобового сопротивления переложенного руля (сила Р?х) и некоторого увеличения сопротивления корпуса при движении с углом дрейфа линейная скорость V постепенно уменьшается, стремясь к некоторому установившемуся значению VycT. Чем лучше поворотливость судна, т. е. чем большую кривизну имеет траектория, тем больше снижается скорость на циркуляции. В среднем на крупнотоннажных морских судах во время циркуляции с рулем на борту при повороте на 90° скорость снижается приблизительно на Vs, а при повороте на 180°— вдвое. При небольших углах перекладки руля снижение скорости на циркуляции невелико. Наиболее типичная траектория судна на циркуляции с рулем, переложенным на борт, показана на рис. 2.5. Геометрически траектория характеризуется следующими элементами циркуляции: выдвиг /| — расстояние, на которое смещается ЦТ судна в направлении первоначального курса от начальной точки Циркуляции до точки, соответствующей изменению курса на 90°; прямое смещение /2 — расстояние от линии первоначального курса по нормали до ЦТ судна к моменту изменения курса на 90°; обратное смещение /3 — максимальное смещение ЦТ судна от линии первоначального курса в сторону, обратную направлению поворота, происходящее в начале циркуляции под влиянием боковой силы руля, вызывающей дрейф судна (обратное смещение обычно пе превышает ширину судна, а на некоторы судау не наблюдается вовсе); диаметр установившейся циркуляции Dуст — расстояние между положениями ДП судна на двух последовательных курсах, отличающихся на 180° при установившемся движении. Условно можно считать, что после поворота на 180° от начального курса движение приобретает установившийся характер, а траектория принимает форму, близкую к окружности. Поскольку при выполнении практических маневров обычно не приходится изменять курс более чем на 180°, можно считать, что все маневры выполняются при неустановившемся движении, т. е. в маневренном и эволюционном периодах.
На управляемость судна оказывают влияние параметры корпуса, к которым в первую очередь относятся: отношение длины к ^иирине LIB, коэффициент общей полноты б, дифферент, а также форма кормовой оконечности, характеризуемая площадью кормового подзора (площадь подреза кормы) /к. Площадь fK (рис. 2.6) ограничивается кормовым перпендикуляром, линией киля (базовой линией) и контуром кормы (на рис. 2.6 заштрихована). В качестве критерия подреза кормы можно использовать коэффициент Ок: (2.5) СТц^1 — Ld где d — средняя осадка, м. Параметр ок является коэффициентом полноты площади ДГ1. К параметрам руля, существенно влияющим на управляемость, относятся его площадь, форма и размещение. Форма руля характеризуется его относительным удлинением, определяемым по формуле, И* SD (2.6) где h — высота руля по баллеру, м; 5Р — площадь пера руля, м*. Рассмотрим отдельно влияние каждого из перечисленных параметров на управляемость. 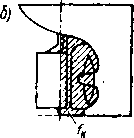 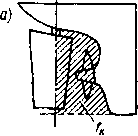 Отношение LIB. Увеличение отношения L/B приводит к росту сопротивления поперечному перемещению (росту поперечной гидродинамической силы Rv), что приводит к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как лобовое сопротивление при малых углах дрейфа возрастает незначительно. Кроме того, возрастает демпфирующее влияние гидродинамического момента Мд, входящего в третье уравнение системы (1.1) , Рис. 2.6. К определению площади кормо- что приводит К уменьшению углового подреза: В0А СКОрости о (скорости изменения рулем°^б3— °корма*'рулем*зa pSESKS"“ «УР™)- ТаКИМ сбрЗЗОМ, СУДа С ОТ- Отношение LIB. Увеличение отношения L/B приводит к росту сопротивления поперечному перемещению (росту поперечной гидродинамической силы Rv), что приводит к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как лобовое сопротивление при малых углах дрейфа возрастает незначительно. Кроме того, возрастает демпфирующее влияние гидродинамического момента Мд, входящего в третье уравнение системы (1.1) , Рис. 2.6. К определению площади кормо- что приводит К уменьшению углового подреза: В0А СКОрости о (скорости изменения рулем°^б3— °корма*'рулем*зa pSESKS"“ «УР™)- ТаКИМ сбрЗЗОМ, СУДа С ОТ-носителыю большим отношением L/B обладают худшей поворотливостью и лучшей устойчивостью на курсе. Коэффициент б. Увеличение 6 приводит к уменьшению силы Ry и уменьшению демпфирующего момента MRy а следовательно, к улучшению поворотливости и ухудшению устойчивости на курсе. Дифферент. Увеличение дифферента на корму приводит к смещению ЦБС от миделя в сторону кормы, поэтому возрастает устойчивость на курсе и ухудшается поворотливость. С другой стороны, дифферент на нос резко ухудшает устойчивость на курсе — судно становится рыскливым, что усложняет маневрирование в стесненных условиях. Коэффициент аК. Суда с большим ак (малая площадь кормового подреза fK) обладают худшей поворотливостью и лучшей устойчивостью на курсе. Площадь руля 5Р. Увеличение Sp увеличивает поперечную силу руля Рру, но в то же время возрастает и демпфирующее действие руля. Практически получается, что увеличение площади руля приводит к улучшению поворотливости лишь при больших углах перекладки. Относительное удлинение руля Хр. Увеличение Хр при неизменной его площади Sp приводит к возрастанию поперечной силы руля, что приводит к некоторому улучшению поворотливости. Расположение руля. Если руль расположен в винтовой струе, то скорость натекания воды на руль возрастает за счет дополнительной скорости потока, вызванной винтом, что обеспечивает значительное улучшение поворотливости. Этот эффект особенно проявляется на одновинтовых судах в режиме разгона, а по мере приближения скорости к установившемуся значению уменьшается. На двухвинтовых судах руль, расположенный в ДП, обладает относительно малой эффективностью. Если же на таких судах установлены два пера руля за каждым из винтов, то поворотливость резко возрастает.
Вращающийся гребной винт на движущемся судне совершает одновременно поступательное движение со скоростью судна относительно невозмущенной воды V* и вращательное движение с угловой скоростью <d=2ял (п — частота вращения винта, об/с). В процессе вращения винта условия работы каждой лопасти периодически изменяются. Это связано с близостью поверхности воды при прохождении лопастью верхнего положения, а также с попутным потоком воды, увлекаемым корпусом. Так как кормовая часть корпуса в верхней части имеет более полные обводы, то и скорость попутного потока в верхней части больше, чем в нижней. Кроме того, струя, отбрасываемая винтом, за счет его вращения закручивается. При этом тангенциальные скорости закрученной струи в верхней части меньше, чем в нижней. При вращении винта вперед такая струя взаимодействует с пером руля, а при вращении назад — с кормовой частью корпуса. Перечисленные условия приводят к тому, что при работе винта, помимо полезной силы упора, возникают нескомпенсированные поперечные силы, влияющие на, управляемость одновинтового судна (на двухвинтовом судне винты, как правило, вращаются в разные стороны, поэтому возникающие поперечные силы при синхронной работе винтов взаимно компенсируются). Поперечные силы, обусловленные работой винта, разделяются на: силы, связанные с попутным потоком воды; силы реакции воды на винт; силы струи от винта, набрасываемой на руль или на корпус. Основные закономерности работы гребного винта можно объяснить, если рассмотреть движение элемента лопасти, показанного на рис. 2.7 (площадь сечения заштрихована). Этот элемент расположен на радиусе г от оси вращения. Скорость поступательного движения элемента — аксиальная скорость равна скорости судна относительно невозмущенной воды V*, а окружная (тангенциальная) скорость элемента о)г=2ллг. Абсолютная скорость элемента относительно невозмущенной воды равна геометрической сумме аксиальной и окружной скоростей. Элемент лопасти можно рассматривать как крыло, движущееся в воде с углом атаки ао. При этом на элементе возникает элементарная гидродинамическая сила dP, пропорциональная углу атаки. Аксиальная составляющая этой силы dPx является силой упора рассматриваемого элемента лопасти, а поперечная составляющая dPy — лобовым сопротивлением этого элемента. Произведение лобового сопротивления на радиус дает момент dM относительно оси вращения винта, возникающий на данном элементе. Если проинтегрировать dPx и dM по длине лопасти и умножить на число лопастей, то получится соответственно сила упора Р, обеспечивающая поступательное движение судна, и момент на валу М, преодолеваемый двигателем. В реальных условиях за корпусом судна, движущегося со скоростью Vs, возникает попутный поток, средняя скорость которого Av. Благодаря попутному потоку фактическая аксиальная скорость винта ир относительно воды оказывается меньше V« на величину Av, т. е. (2.7) 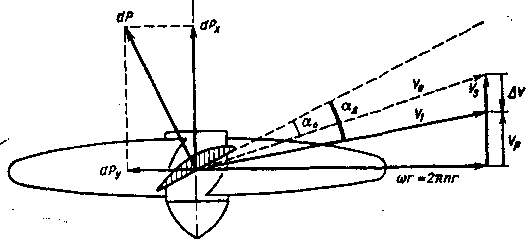 / \ Рис. 2.7. Работа элемента лопасти вращающегося вперед гребного винта при движении судна передним ходом При этом очевидно (см. рис. 2.7), что действительный угол атаки ад больше, чем угол атаки относительно невозмущенной воды ао. При возрастании угла атаки от ао до ад сила dP также увеличивается, а это приводит к увеличению силы лобового сопротивления dPy. Рис. 2.8. Работа элемента лопастн вращающегося назад гребного винта при движении судна передним ходом Напомним, что попутный поток, увлекаемый корпусом судна, имеет в верхней части ббльшую скорость, чем в нижней, поэтому и углы атаки будут иметь наибольшее значение при прохождении лопастями верхнего положения. Лопасти при этом будут испытывать максималь ное лобовое сопротивление. Поскольку силы лобового сопротивления для лопасти в верхнем и нижнем положениях направлены противоположно, то результирующая этих сил для винта правого вращения стремится сместить корму в сторону действий большей силы, т. е. влево. Если же на движущемся вперед судне винт работает назад, то угол атаки уменьшается (рис. 2.8), а следовательно, уменьшается и сила лобового сопротивления dPy на каждом элементе лопасти, причем в верхнем положении лопастей такое уменьшение выражено сильнее, чем в нижнем, так как в нижней части скорость попутного потока меньше. Из сказанного следует, что при работе винта назад результирующая горизонтальная сила лобового сопротивления лопастей будет направлена в сторону левого борта, т. е. так же, как и при работе винта вперед. Отметим, что при отсутствии хода вперед или при движении судна задним ходом попутный поток отсутствует, поэтому рассмотренная боковая сила в этих условиях не возникает. Таким образом, на судно с одним винтом правого вращения боковая сила, возникающая благодаря влиянию попутного потока, действует только при движении судна вперед и независимо от направления вращения винта стремится сместить корму в сторону левого борта Кроме попутного потока, на работу винта оказывает влияние и близость поверхности воды, в связи с чем имеет место подсос воздуха к лопастям в верхней половине диска винта независимо от направления его вращения. При этом лопасти в верхнем положении при вращении испытывают меньшую силу реакции воды, чем к нижнем. Вследствие этого возникает результирующая сила реакции воды, всегда направленная в сторону вращения винта. На судно с винтом правого вращения сила реакции воды при работе винта вперед стремится сместить корму вправо, а при работе назад—влево. С уменьшением осадки кормой и особенно при частичном оголении винта боковая сила реакции возрастает. Для более полной оценки влияния боковых сил на поведение судна нужно еще учитывать взаимодействие винтовой струи с рулем и кор пусом судна. Гребной винт при вращении вперед или назад не только отбрасывает поток воды в противоположную сторону, но также и закручивает его, т. е. придает потоку не только аксиальную, но и тангенциальную скорость. При этом независимо от направления вращения винта в верхней части диска за счет влияния близкой поверхности тангенциальная скорость потока меньше, чем в нижней.  Рис. 2.9. Действие боковых сил, связанных с работой винта: а — судно движется вперед, винт вращается вперед; б — судно движется вперед, винт вращается назад; в — судно движется назад, винт вращается назад При работе винта правого вращения на передний ход закручивание потока приводит к косому натеканию воды на руль. Скос потока в верхней половине струи направлен вправо, а в нижней — влево. При этом скос потока в нижней части благодаря повышенной тангенциальной скорости больше, чем в верхней. Следовательно, и сила воздействия струи на единицу площади руля внизу больше. Если площадь пера руля, попадающая в струю, распределяется поровну между верхней и нижней половинами струи, то на переложенный руль будет воздействовать результирующая сила набрасывания воды, стремящаяся сместить корму влево. Часто на современных судах рули имеют клиновидную форму и располагаются так, что в верхнюю половину струи попадает большая часть площади руля. В этом случае результирующая сила набрасывания струи на переложенный руль может частично или полностью компенсироваться. При вращении винта назад закрученный поток воды набрасывается на кормовую часть судна. При этом благодаря закручиванию потока против часовой стрелки с правого борта под кормовым подзором создается повышенное давление воды, а с левого борта — пониженное. В связи с перепадом давления результирующая сила — сила набрасывания струи на корпус всегда направлена влево, т. е. стремится развернуть корму в сторону левого борта. На рис. 2.9 показаны направления боковых сил, приложенных к кормовой части при различных сочетаниях направлений движения судна и вращения гребного винта, с использованием следующих обозначений: Fnn — сила, связанная с действием попутного потока; Fpu — сила реакции воды; FCp— сила винтовой струи, набрасываемой на руль; FCK — сила винтовой струи, набрасываемой на корпус. Для каждого из приведенных на рисунке случаев стрелками показаны направление и степень тенденции разворота кормы (прерывно'' тая стрелка — слабая или неустойчивая, тонкая стрелка — четко выраженная, жирная стрелка—сильно выраженная тенденция). Поведение одновинтового судна в каждый момент при выполнении различных маневров в штилевую погоду определяется совместным влиянием момента переложенного руля, моментов сил F„п, Fрц и одной из двух сил /*\Р или FCK» а также моментом гидродинамической силы на корпусе, обусловленной углом дрейфа. Отметим некоторые особенности поведения такого судна с винтом правого вращения. При движении вперед после дачи заднего хода судно обычно начинает разворачиваться вправо, постепенно ускоряя поворот. Это происходит под действием сил Fnn, Fpil и FCK, приложенных к кормовой части и направленных в сторону левого борта, т. е. создающих момент вокруг вертикальной оси. При этом даже при значительной скорости переднего хода судно практически не слушается руля. Если дать задний ход на остановленном относительно воды судне, то корма независимо от положения руля обычно начинает уклоняться влево под влиянием сил Fрц и FCK. После приобретения скорости заднего хода некоторые суда начинают реагировать, хотя и слабо, на переложенный руль. Эффективность руля, как правило, возрастает, если при наличии скорости заднего хода застопорить винт, что можно объяснить прекращением действия силы набрасывания винтовой струи на корпус Fck Если на остановленном или движущемся назад судне дать передний ход, то судно обычно хорошо разворачивается в любую сторону после соответствующей перекладки руля. Отмеченные особенности поведения одновинтовых судов следует рассматривать как наиболее типичные. В то же время встречаются суда, поведение которых может существенно отличаться от рассмотренных закономерностей. Значительную роль могут играть и начальные условия при выполнении того или иного маневра. Так, например, при торможении реверсированием двигателя на задний ход судно, не обладающее собственной устойчивостью (см. п. 2.1), может вместо разворота вправо остаться на прежнем курсе или даже начать разворачиваться влево, если непосредственно перед реверсированием имело место зарыскивание в сторону левого борта. Следует учитывать, что поведение судна может резко измениться под влиянием ветра. 2.S. Управляемость одновинтового судна на заднем ходу Управляемость судна на заднем ходу, как уже отмечалось в предыдущем параграфе, значительно хуже,#чем на переднем. Основными причинами этого являются особенности условий работы руля и корпуса при движении задним ходом. Рассмотрим эти особенности. При движении судна назад с переложенным рулем набегающий поток воды создает поперечную силу на руле Рру, направленную в сторону того борта, на какой переложен руль. На рис. 2.10 показано направление этой силы при руле, переложенном влево. У Рру Lr | я у 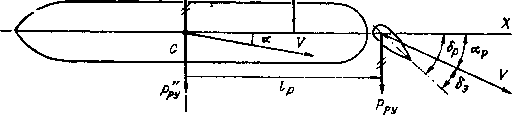 Рис. 2.10. Управляемость на заднем ходу Для объяснения возникающих при этом явлений приложим в центре тяжести G (см. рис. 2.10) две силы, равные по величине силе Рру и направленные в противоположные стороны (такие силы ничего не изменяют, так как взаимно компенсируют друг друга). Одна из этих сил вместе с силой на руле Рру образует пару сил с моментом Рру/р, стремящимся повернуть судно вокруг вертикальной оси, а другая сила, оставаясь нескомпенсированной, вызывает поперечное смещение судна. При таком смещении возникает угол дрейфа а, благодаря которому на корпусе возникает поперечная гидродинамическая сила Ryt точка приложения которой смещена от центра тяжести в сторогу кормы на величину /д. Момент этой силы RylH препятствует повороту судна в сторону перекладки руля. Если на переднем ходу момент поперечной гидродинамической силы в начале поворота имеет одинаковый знак с моментом руля и, следовательно, способствует повороту (см. рис. 2.3), то на заднем ходу этот момент препятствует повороту. Кроме указанной причины, отрицательное влияние на поворотливость оказывает косое натекание воды на руль, за счет чего эффективный угол перекладки руля бэ оказывается уменьшенным на угол дрейфа аР по сравнению с геометрическим углом перекладки 6Р. На переднем ходу этот эффект сказывается гораздо меньше за счет спрямляющего влияния па поток со стороны корпуса, в то время как на заднем ходу руль находится по движению впереди, поэтому корпус не оказывает влияния на направление потока в месте расположения руля. Перечисленными причинами и объясняется в первую очередь плохая управляемость судов на заднем ходу.
Одновинтовые суда по сравнению с многовинтовыми в общем случае имеют более высокий пропульсивный КПД. Однако управление такими судами в стесненных условиях (например, в узкостях, при выполнении швартовных операций, во льдах и т. п.) намного сложнее. Кроме того, на крупнотоннажных судах с повышенными скоростями технически затруднительно сосредоточить требуемую большую мощность на одном валу. С учетом указанных и некоторых других обстоятельств на крупных пассажирских судах обычно применяются двухвальные силовые установки. Трех- и четырехвальные установки находят применение на быстроходных судах большого водоизмещения и на ледоколах. Для обеспечения симметричной управляемости винты двухвинтовых, а также бортовые винты у трехвинтовых судов имеют противоположное направление вращения. На некоторых двухвинтовых судах для повышения поворотливости устанавливают два пера руля за винтами. Двухвинтовое судно при выходе из строя одной машины или повреждении одного винта может двигаться и управляться с помощью второго винта и руля, а при выходе из строя рулевого устройства сохраняет управляемость с помощью раздельной работы двух винтов. Двухвинтовое судно может разворачиваться практически на месте за счет работы винтов враздрай. Разворачивающий момент при этом создается не только за счет расположения винтов по разные стороны от ДП, т. е. наличия плеча, но и за счет разности давлений воды у бортов кормового подзора, создаваемой противоположно направленными струями от винтов. К недостаткам двухвиитовых судов следует отнести пониженную эффективность расположенного в ДП руля, особенно в случае винтов наружного направления вращения, а также повышенную опасность повреждения винтов, например, о причал во время швартовных операций. Трехвинтовые суда объединяют в себе маневренные свойства одно- и двухвинтовых судов. Контрольные вопросы. I. Какими двумя основными свойствами характеризуется управляемость судна? 2. Какими особенностями характеризуется поведение судна, не обладающего собственной устойчивостью на курсе? 3. Какими периодами характеризуется процесс циркуляции судна? 4. Как влияет на поворот судна момент поперечной гидродинамической силы, приложенной к корпусу? 5. Зависят ли элементы циркуляции судна от значения исходной установившейся скорости? 6. Что называют предельным углом обратной поворотливости? |