Раздел долгосрочного плана: Раздел 2 - Робототехника
|
Школа:
|
Дата:
|
ФИО учителя:
|
Класс: 4
|
Количество присутствующих:
|
отсутствующих:
|
Тема урока
|
Датчик цвета
|
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу)
|
4.5.1.1 использовать датчик цвета
|
Цели урока
|
использовать ультразвуковой датчик для определения расстояния до объекта.
|
Критерии оценивания
|
- объясняет назначение ультразвукового датчика
- использует ультразвуковой датчик для определения расстояния до объекта.
|
Языковые цели
|
Формулируются для неязыковых предметов.
Учащиеся могут:
использовать ультразвуковой датчик для определения расстояния до объекта.
Определите языковые цели, включая примеры лексики и фраз.
Учащиеся могут:
объяснять назначение датчиков цвета и ультразвука.
Лексика и терминология, специфичная для предмета:
датчик цвета, программируемый модуль, ультразвуковой датчик,
моторы, расстояние, ожидание,
сравнение, вперед, назад, повороты, скорость, алгоритм, тест, порты ввода, порты вывода
Полезные выражения для диалогов и письма:
Устройства для определения цвета позволяют …
Устройства для определения расстояния бывают …
Программные блоки для создания движения робота являются …
При помощи программы для создания движения робота можно …
|
Привитие ценностей
|
Уважениеи сотрудничество осуществляется через проведение работ в парах, группе
|
Межпредметные связи
|
Математика, физика
|
Предварительные знания
|
Учащиеся начинали знакомство с курсом робототехники в 1-3 классах.
Учащиеся умеют запускать программу, собирать базовую модель образовательного робота, управлять движением робота, устройствами ввода и вывода, датчика касания, моторов и знают их назначение, умеют открывать, редактировать, сохранять файлы. Знакомы с интерфейсом и основными возможностями приложения для разработки программ для робота.
|
Ход урока
|
Запланированные этапы урока
|
Запланированная деятельность на уроке
|
Ресурсы
|
5 мин.
5 мин.
|
Организационный момент. Проверка присутствующих.
Повторение изученного проверить с помощью проведения игры «Истина-ложь».
Определение темы урока
(К, Ф) Просмотр видео о том, как ориентируются в пространстве летучие мыши. Предложить ответить на вопросы:
С помощью чего мышь определяет, есть ли перед ней препятствие?
Значения каких величин можно определить с помощью подобного датчика?
Приведите примеры, в каких ситуациях можно использовать ультразвук (автоматические двери, пешеходные переходы, парктроник, управление включением/выключением света).
Люди каких профессий могут использовать робота с ультразвуковым датчиком и каким образом.
|
Презентация PowerPoint
Детям о летучих мышах
|
7 мин.
5 мин.
3 мин.
10 мин.
|
Работа в парах.Рассмотреть устройство датчика, познакомиться с правилами обращения с ним. Учащиесядолжны подключить датчик к роботу и посмотреть на компьютере, какие значения он выводит.
(К) Провести эксперимент, используя ультразвуковой датчик. Написать программу движущегося по прямой линии робота, который должен остановиться на расстоянии 15 см от стены ил препятствия.
(Г, Ф)Провести простые эксперименты:
1-группа: измерить расстояние от руки до датчика;
2-группа: измерить расстояние от стола до пола;
3-группа: определить предел измерения расстояния: минимальное и максимальное значения.
Работа в группах:
Примеры задач.
Написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия
Робот стоит от препятствия на расстоянии 1 м, подъезжает постепенно к препятствию и через каждые 20 см издает звук.
Робот крутится вокруг себя и, если видит предмет, подъезжает к нему. Предмет находится на расстоянии не менее 1 м.
Пусть робот едет прямо и перед ним окажется препятствие. Робот будет ехать прямо до тех пор, пока расстояние между ним и препятствием не будет равна 23 см. После того, как робот остановится, он повернет на 180 градусов и проедет 2 оборота прямо вперед, подальше от препятствия.
Учащиеся представляют работу всему классу.
|
Материалы о работе датчика
|
5 мин.
|
Рефлексия
Учащиеся отвечают на вопросы:
Что получилось на уроке?
Что не получилось?
Что нового узнал?
|
|
Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися?
|
Оценивание – как Вы планируете проверить уровень усвоения материала учащимися?
|
Здоровье и соблюдение техники безопасности
|
Дифференциация может быть выражена в подборе заданий, в ожидаемом результате от конкретного ученика, в оказании индивидуальной поддержки учащемуся, в подборе учебного материала и ресурсов с учетом индивидуальных способностей учащихся (Теория множественного интеллекта по Гарднеру).
Дифференциация может быть использована на любом этапе урока с учетом рационального использования времени.
|
Используйте данный раздел для записи методов, которые Вы будете использовать для оценивания того, чему учащиеся научились во время урока.
|
Здоровьесберегающие технологии.
Используемые физминутки и активные виды деятельности.
Пункты, применяемые из Правил техникибезопасности на данном уроке.
|
Рефлексия по уроку
Были ли цели урока/цели обучения реалистичными?
Все ли учащиеся достигли ЦО?
Если нет, то почему?
Правильно ли проведена дифференциация на уроке?
Выдержаны ли были временные этапы урока?
Какие отступления были от плана урока и почему?
|
Используйте данный раздел для размышлений об уроке. Ответьте на самые важные вопросы о Вашем уроке из левой колонки.
|
|
Общая оценка
Какие два аспекта урока прошли хорошо (подумайте как о преподавании, так и об обучении)?
1:
2:Что могло бы способствовать улучшению урока (подумайте как о преподавании, так и об обучении)?
1:
Что я выявил(а) за время урока о классе или достижениях/трудностях отдельных учеников, на что необходимо обратить внимание на последующих уроках?
|
Раздел долгосрочного плана: Раздел 2 - Робототехника
|
Школа:
|
Дата:
|
ФИО учителя:
|
Класс: 4
|
Количество присутствующих:
|
отсутствующих:
|
Тема урока
|
Датчик ультразвука
|
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу)
|
4.5.1.2 использовать датчик ультразвука
|
Цели урока
|
использовать ультразвуковой датчик для определения расстояния до объекта.
|
Критерии оценивания
|
- объясняет назначение ультразвукового датчика
- использует ультразвуковой датчик для определения расстояния до объекта.
|
Языковые цели
|
Учащиеся могут:
использовать ультразвуковой датчик для определения расстояния до объекта.
Определите языковые цели, включая примеры лексики и фраз.
Учащиеся могут:
объяснять назначение датчиков цвета и ультразвука.
Лексика и терминология, специфичная для предмета:
датчик цвета, программируемый модуль, ультразвуковой датчик,
моторы, расстояние, ожидание,
сравнение, вперед, назад, повороты, скорость, алгоритм, тест, порты ввода, порты вывода
Полезные выражения для диалогов и письма:
Устройства для определения цвета позволяют …
Устройства для определения расстояния бывают …
Программные блоки для создания движения робота являются …
При помощи программы для создания движения робота можно …
|
Привитие ценностей
|
Уважениеи сотрудничество осуществляется через проведение работ в парах, группе
|
Межпредметные связи
|
Математика, физика
|
Предварительные знания
|
Учащиеся начинали знакомство с курсом робототехники в 1-3 классах.
Учащиеся умеют запускать программу, собирать базовую модель образовательного робота, управлять движением робота, устройствами ввода и вывода, датчика касания, моторов и знают их назначение, умеют открывать, редактировать, сохранять файлы. Знакомы с интерфейсом и основными возможностями приложения для разработки программ для робота.
|
Ход урока
|
Запланированные этапы урока
|
Запланированная деятельность на уроке
|
Ресурсы
|
5 мин.
5 мин.
|
Организационный момент. Проверка присутствующих.
Повторение изученного проверить с помощью проведения игры «Истина-ложь».
Определение темы урока
(К, Ф) Просмотр видео о том, как ориентируются в пространстве летучие мыши. Предложить ответить на вопросы:
С помощью чего мышь определяет, есть ли перед ней препятствие?
Значения каких величин можно определить с помощью подобного датчика?
Приведите примеры, в каких ситуациях можно использовать ультразвук (автоматические двери, пешеходные переходы, парктроник, управление включением/выключением света).
Люди каких профессий могут использовать робота с ультразвуковым датчиком и каким образом.
|
Презентация PowerPoint
|
7 мин.
5 мин.
3 мин.
10 мин.
|
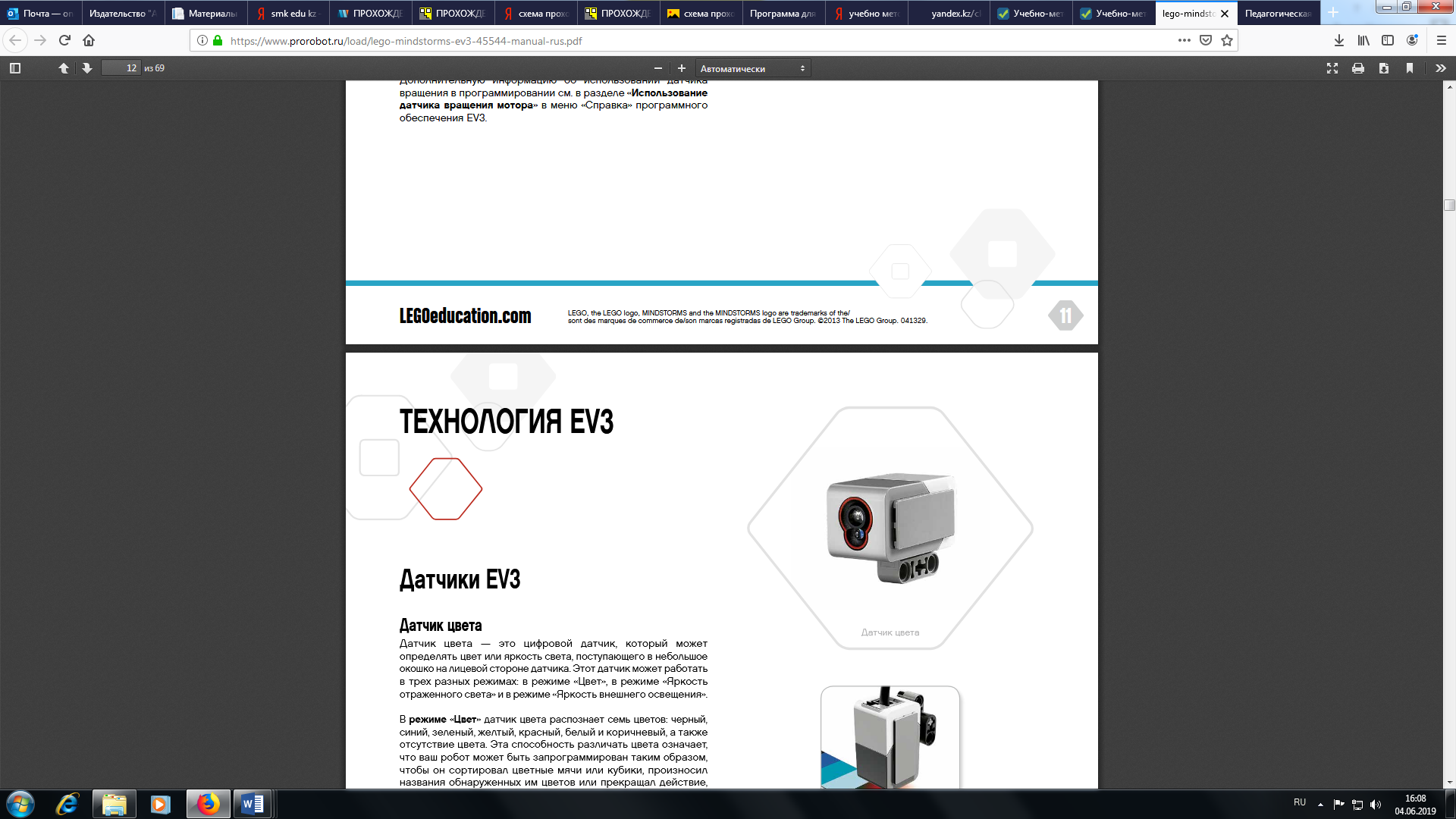
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.

Рис. 1
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах - от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов). Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим "Присутствие/слушать". В этом режиме датчик не излучает ультразвуковые импульсы, но способен обнаруживать импульсы другого ультразвукового датчика.
У нашего робота, собранного по инструкции small-robot-45544, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту "3" модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
Для решения задачи воспользуемся уже знакомым нам программным блоком "Ожидание" Оранжевой палитры, переключив его в Режим: "Ультразвуковой датчик" - "Сравнение" - "Расстояние в сантиметрах" (Рис. 2). Само решение будет похоже на решение Задачи №7.
Провести простые эксперименты:
1-группа: измерить расстояние от руки до датчика;
2-группа: измерить расстояние от стола до пола;
3-группа: определить предел измерения расстояния: минимальное и максимальное значения.
Работа в группах:
Примеры задач.
Написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия
Робот стоит от препятствия на расстоянии 1 м, подъезжает постепенно к препятствию и через каждые 20 см издает звук.
Робот крутится вокруг себя и, если видит предмет, подъезжает к нему. Предмет находится на расстоянии не менее 1 м.
Пусть робот едет прямо и перед ним окажется препятствие. Робот будет ехать прямо до тех пор, пока расстояние между ним и препятствием не будет равна 23 см. После того, как робот остановится, он повернет на 180 градусов и проедет 2 оборота прямо вперед, подальше от препятствия.
Учащиеся представляют работу всему классу.
|
Материалы о работе датчика
https://robot-help.ru/lessons/lesson-7.html
ультразвуковой датчик (презентация)
https://infourok.ru/prezentaciya-po-robototehnike-na-temu-izuchaem-ultrazvukovoy-datchik-lego-mindstorms-ev-1603327.html
|
5 мин.
|
Рефлексия
Учащиеся отвечают на вопросы:
Что получилось на уроке?
Что не получилось?
Что нового узнал?
|
|
Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися?
|
Оценивание – как Вы планируете проверить уровень усвоения материала учащимися?
|
Здоровье и соблюдение техники безопасности
|
Дифференциация может быть выражена в подборе заданий, в ожидаемом результате от конкретного ученика, в оказании индивидуальной поддержки учащемуся, в подборе учебного материала и ресурсов с учетом индивидуальных способностей учащихся (Теория множественного интеллекта по Гарднеру).
Дифференциация может быть использована на любом этапе урока с учетом рационального использования времени.
|
Используйте данный раздел для записи методов, которые Вы будете использовать для оценивания того, чему учащиеся научились во время урока.
|
Здоровьесберегающие технологии.
Используемые физминутки и активные виды деятельности.
Пункты, применяемые из Правил техникибезопасности на данном уроке.
|
Рефлексия по уроку
Были ли цели урока/цели обучения реалистичными?
Все ли учащиеся достигли ЦО?
Если нет, то почему?
Правильно ли проведена дифференциация на уроке?
Выдержаны ли были временные этапы урока?
Какие отступления были от плана урока и почему?
|
Используйте данный раздел для размышлений об уроке. Ответьте на самые важные вопросы о Вашем уроке из левой колонки.
|
|
Общая оценка
Какие два аспекта урока прошли хорошо (подумайте как о преподавании, так и об обучении)?
1:
2:
Что могло бы способствовать улучшению урока (подумайте как о преподавании, так и об обучении)?
1:
2:Что я выявил(а) за время урока о классе или достижениях/трудностях отдельных учеников, на что необходимо обратить внимание на последующих уроках?
|
Раздел 2. Робототехника. Лабиринты и кегль-ринг
|
Школа:
|
Дата:
|
ФИО учителя:
|
Класс: 4
|
Количество присутствующих:
|
отсутствующих:
|
Тема урока
|
Выход из лабиринта
|
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу)
|
4.5.1.2 использовать датчик ультразвука
|
Цели урока
|
- использовать датчик ультразвука для определения расстояния
|
Воспитательная цель
|
- воспитание аккуратности и внимательности при выполнении работ с применением ПК, формирование у учеников навыков самоконтроля.
|
Критерии оценивания
|
Критерий
|
Уровеньмыслительныхнавыков
|
Дескрипторы
Учащийся:
|
использовать
ультразвуковой датчик для
определения расстояния до
объекта
|
знание, понимание
|
объясняет использование
ультразвукового датчика для
определения расстояния до
объекта
|
|
Языковые цели
|
Языковые цели:
- приводить примеры использования датчиков цвета и ультразвука;
- объяснять назначение датчиков цвета и ультразвука.
Предметная лексика и терминология:
датчик цвета, программируемый модуль, ультразвуковой датчик, моторы, расстояние, ожидание, сравнение, вперед, назад, повороты, скорость, алгоритм, тест, порты ввода, порты вывода
Полезные выражения для диалога/письма:
Устройства для определения цвета позволяют … Устройства для определения расстояния бывают … Программные блоки для создания движения робота являются … При помощи программы для создания движения робота можно …
|
Привитие ценностей
|
Привитие ценностей уважения, сотрудничества и открытости осуществляется через групповую работу и коллективное обсуждение. Формирование у учащихся прочных знаний о важности требований эргономики при работе с современными средствами вычислительной техники. Научить учащихся не только эффективно использовать средства ИКТ, но и добросовестного исполнения обязанностей, стремление к достижению высоких результатов с опорой на здоровьесберегающие технологии.
|
Межпредметные связи
|
Математика.
|
Предварительные знания
|
Учащиеся умеют запускать программу, собирать базовую модель образовательного робота, управлять движением робота, устройствами
ввода и вывода, датчика касания, моторов и знают их назначение, умеют открывать, редактировать, сохранять файлы. Знакомы с
интерфейсом и основными возможностями приложения для разработки программ для робота.
|
Ход урока:
|
Заплани-рованные этапы урока
|
Запланированная деятельность на уроке
|
Ресурсы
|
Начало урока
0-3 мин
|
Психологический настрой на урок игра «Пожелание». Учащиеся становятся в круг, кидают друг другу мяч и высказывают хорошее пожелание на урок.
|
|
4-5 мин
|
Задание на концентрацию внимания «Найти отличия в изображениях».
|
Презентация
|
6-10мин
|
Формулировка темы и цели урока.
Чтобы подвести учащихся к формулированию темы и целей урока, учитель организует игру, в ходе которой ученики получают начальное представление о том, как робот может выбирать маршрут движения.
(К)Игра «Лабиринт». Все учащиеся выстраиваются, образуя «лабиринт». Один ученик выступает в роли робота. Он должен с закрытыми глазами пройти по «лабиринту».
После игры предлагаются вопросы для обсуждения ситуации:
Как «робот»находил путь в «лабиринте»?
Действия «робота» при обнаружении препятствия.
От чего зависит время движения?
От чего будет зависеть эффективность алгоритма движения «робота»?
Учащиеся формулирует тему и цели урока, которые представлены на слайде.
|
Презентация
|
Середина урока
11-20 мин
|
(Д) Учитель демонстрирует видеоролик о движении робота по лабиринту.
Лабиринт– это структура взаимосвязанных путей.
Цель движения по лабиринту –найти дорогу от входа к выходу.
(О) Учитель объясняет алгоритм движения робота по лабиринту.
Для того, чтобы понять, как запрограммировать робота, для перемещения его по лабиринту, рекомендуется поставить себя на место робота и думать, а как бы вы начали действовать...
Учитель: Итак, вы оказались в лабиринте...
|

|
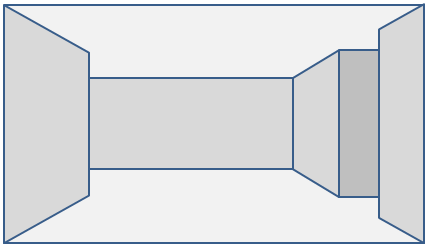
На самом деле, если вы робот, то лабиринт для вас будет выглядеть вот так.

Робот ничего не видите. У него нет глаз.
Что будет делать человек в таком случае? Идти вперед выставив руки перед собой. Наиболее разумной идеей было бы попытаться найти опору в виде стены для какой-либо руки. Допустим, правой. Как только стена обнаружена, вы в вправе двигаться вперед или назад. Стена в таком случае будет являться вашим путеводителем, опорой в этом "темном" мире.
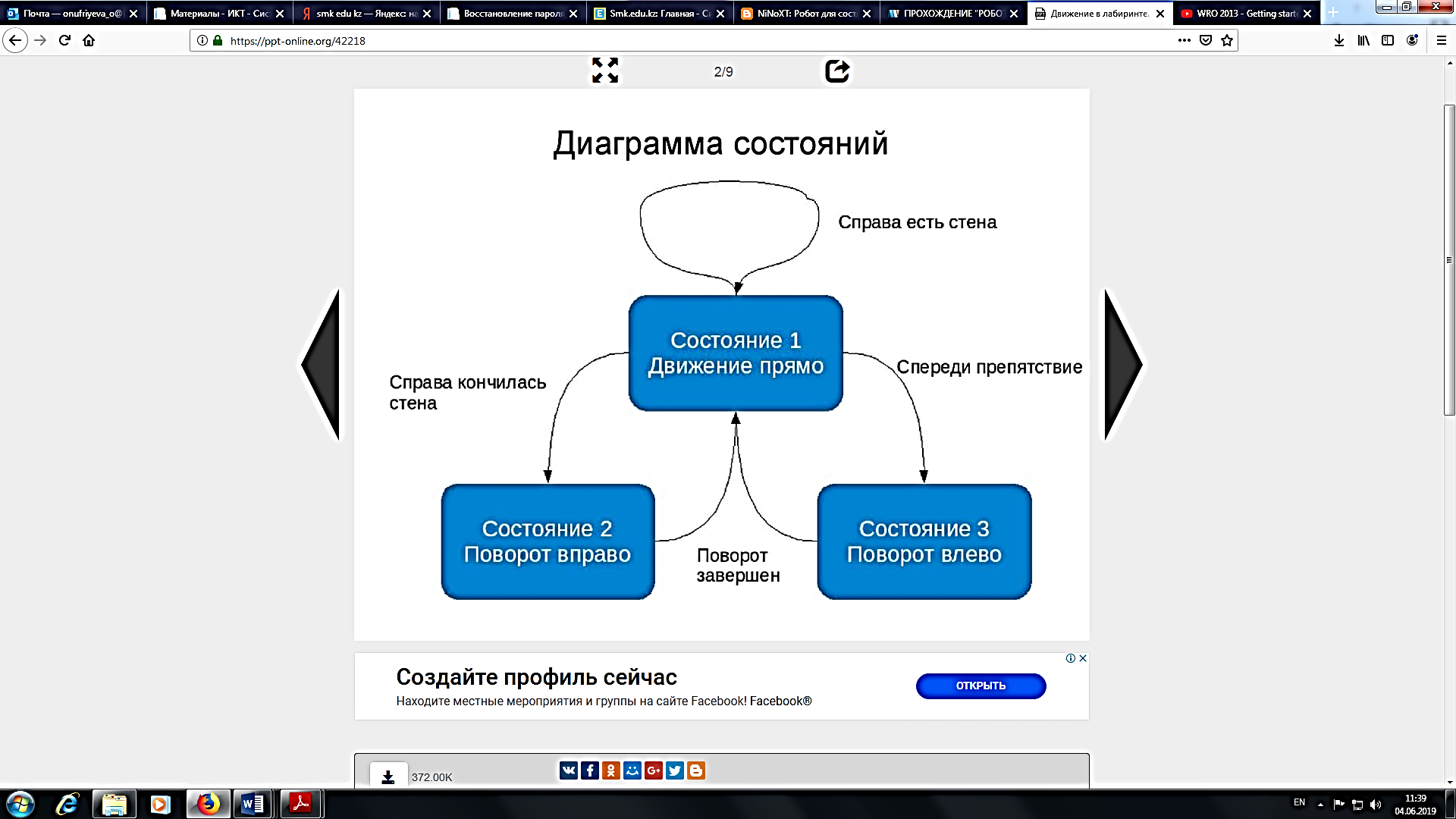
В итоге получается следующее правило обхода лабиринта: двигаемся прямо, пока под нашей рукой чувствуется стена, как только стена обрывается поворачиваемся направо, чтобы найти ее и двигаемся снова вдоль стены, если же другой рукой мы ощутили стену спереди, то поворачиваемся налево и используем уже эту стену для движения вдоль нее.
Приведенный выше алгоритм называется "Правилом правой руки" и может быть успешно использован для выхода из всех лабиринтов, которые имеют выход.
У робота такой рукой могут быть сенсоры расстояния, касания или даже освещенности. Если робот использует сенсор касания, то во время движения в момент, когда стена потеряется, он выдаст сигнал, который будет служить для робота поводом изменить свое поведение.

Когда робот «видит»стену – он движется. Когда стенаобрывается, значит, лабиринт в этом месте имеет поворот. Робот должен сделать поворот.
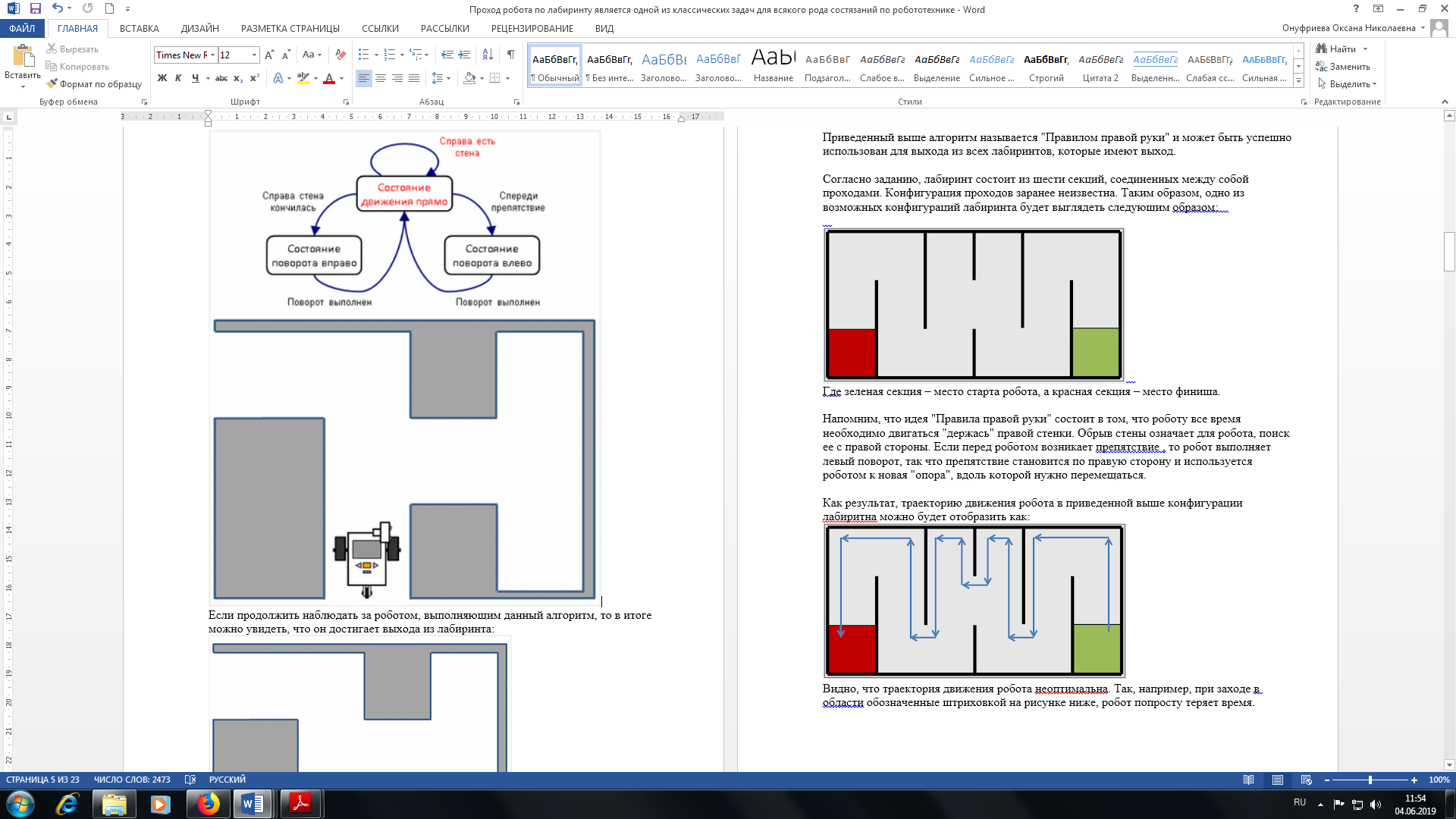
Если робот дойдет до стены, то реакцией на столкновение со стеной будет поворот к ней боком, после чего уже эта стена будет использована как "опорная". Движение продолжится вдоль нее.
Схематично движение можно представить так:
Если продолжить наблюдать за роботом, выполняющим данный алгоритм, то в итоге можно увидеть, что он достигает выхода из лабиринта:
|
Презентация
Видео-ресурсы:
https://www.youtube.com/watch?v=2Pz0XcT75O4
Интернет-ресурсы:
https://ppt-online.org/42218
http://nnxt.blogspot.com/2011/02/i.html
Интернет-
ресурсы:
https://mosmetod.ru/metodicheskoe-prostranstvo/robototekhnika/uchebno-metodicheskie-materialy/robokontroller/prokhozhdenie-labirinta-pravilo-pravoj-ruki.html
|
21-22 мин
|
Физминутка.
Учащиеся под музыкальное сопровождение на слайде выполняют упражнения.
Можно выбрать одного ученика, который будет показывать движения.
|
Видеоресуры:
https://yandex.kz/video/search?text=%D1%84%D0%B8%D0%B7%D0%BC%D0%B8%D0%BD%D1%83%D1%82%D0%BA%D0%B0&path=wizard&noreask=1&filmId=10446558784837143442
|
23-27 мин
|
(И)Индивидуальная работа на закрепление материала. Выполнение заданий по карточкам.
Задание №1. Заполнить таблицу.
|
Устройство
|
Название устройства
|
Назначение устройства
|
1
|

|
|
|
2
|

|
|
|
3
|
|
|
|
|
|
28-30 мин
|
(П, ФО)Взаимооценивание в парах работ по образцу
на слайде с использованием дескрипторов.
Дескрипторы.
Учащийся:
|
|
Правильно указал название и назначение первого устройства.
|
|
Правильно указал название и назначение второго устройства.
|
|
Правильно указал название и назначение третьего устройства.
|
|
|
Работы учащихся
Карточки с дескрипторами
Презентация
|
31-35 мин
|
(И) Индивидуальная работа на закрепление материала. Выполнение заданий по карточкам.
Задание №2. Записать алгоритм выхода из лабиринта, используя команды:
- шаг вперед
- шаг назад
- налево 90
- направо 90
- если препятствие
- если выход
В качестве дифференциации в данном задании предлагаются лабиринты трех уровней сложности: легкий, средний, сложный.
|
Карточки с заданиями и лабиринтами
|
36-37 мин
|
(П, ФО)Учащиеся обмениваются лабиринтами и в парах выполняют проверку составленных алгоритмов.
|
Алгоритмы учащихся
|
Конец урока
38-40 мин
|
Рефлексия «Лестница успеха».
Учащиеся отмечают смайликами уровень усвоения темы:
- знаю
- понимаю
-умею
|
Презентация, шкала для рефлексии, смайлики
|
Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися?
|
Оценивание – как Вы планируете проверить уровень усвоения материала учащимися?
|
Здоровье и соблюдение техники безопасности
|
Дифференцированные задания на этапе закрепления материала.
|
Формативное оценивание, взаимооценивание учащихся в парах по критериям.
Обратная связи после каждого этапа урока.
Рефлексия «Лестница успеха».
|
Повторение правил техники безопасности и правил эргономики.
| |
 Скачать 5.34 Mb.
Скачать 5.34 Mb.