Роль механики в подготовке будущего инженерамеханика. Основные этапы развития механики
 Скачать 2.42 Mb. Скачать 2.42 Mb.
|

15.Приведение плоской системы сил к центруТ 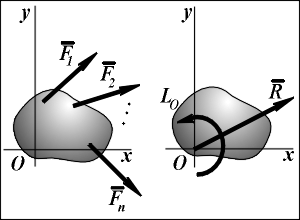 еорема о приведении системы сил: еорема о приведении системы сил:Любая система сил, действующих на абсолютно твердое тело, может быть заменена одной силой R, равной главному вектору этой системы сил и приложенной к произвольно выбранному центру О, и одной парой сил с моментом LO, равным главному моменту системы сил относительно центра О. Такая эквивалентная замена данной системы сил силой R и парой сил с моментом LO называютприведением системы сил к центу О. Рассмотрим здесь частный случай приведения плоской системы сил к центру О, лежащему в той же плоскости. В этом случае система сил заменяется одной силой и одной парой сил, лежащих в плоскости действия сил системы. Момент этой пары сил можно рассматривать как алгебраическую величину LO и изображать на рисунках дуговой стрелкой ( алгебраический главный момент плоской системы сил ). В результате приведения плоской системы сил к центру возможны следующие случаи:
16 вопрос. Уравнение равновесия Для равновесия твердрго тела, находящегося под действием плоской системы сил,необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы. Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) плоской системы сил можно сформулировать в следующих трех формах:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма их алгебраических моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю: Fix = 0; Fiy = 0; MO(Fi) = 0. (I)
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно двух центров А и В и сумма их проекций на ось Ox, не перпендикулярную оси Ox, были равны нулю: Fix = 0; MА(Fi) = 0; MВ(Fi) = 0. (II)
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно любых трех центров А,В и С, не лежащих на одной прямой, были равны нулю: MА(Fi) = 0; MВ(Fi) = 0; MС(Fi) = 0. (III) Уравнения равновесия в форме (I) считаются основными, так как при их использовании нет никаких ограничений на выбор координатных осей и центра моментов. 17 вопрос Теорема Вариньона. Если рассматриваемая плоская система сил приводится к равнодействующей, то момент этой равнодействующей относительно какой-либо точки равен алгебраической сумме моментов всех сил данной системы относительно той оке самой точки.Предположим, что система сил приводится к равнодействующей R, проходящей через точку О. Возьмем теперь в качестве центра приведения другую точку O1. Главный момент (5.5) относительно этой точки равен сумме моментов всех сил: MO1Z=åMo1z(Fk) (5.11). С другой стороны, имеем MO1Z=MOlz(R), (5.12) так как главный момент для центра приведения О равен нулю (MOz=0). Сравнивая соотношения (5.11) и (5.12), получаем MO1z(R)=åMOlZ(Fk); (5.13) ч.т.д. При помощи теоремы Вариньона можно найти уравнение линии действия равнодействующей. Пусть равнодействующая R1 приложена в какой-либо точке О1 с координатами х и у (рис. 5.5) и известны главный вектор Fo и главный момент МОя при центре приведения в начале координат. Так как R1=Fo, то составляющие равнодействующей по осям х и у равны Rlx=FOx=FOxi и Rly=FOy=Foyj. Согласно теореме Вариньона момент равнодействующей относительно начала координат равен главному моменту при центре приведения в начале координат, т. е. Моz=MOz(R1)=xFOy–yFOx. (5.14). Величины MOz, FOx и Foy при переносе точки приложения равнодействующей вдоль ее линии действия не изменяются, следовательно, на координаты х и ув уравнении (5.14) можно смотреть как на текущие координаты линии действия равнодействующей. Таким образом, уравнение (5.14) есть уравнение линии действия равнодействующей. При Fox≠0 его можно переписать в виде y=(Foy/Fox)x–(Moz/Fox). 18 вопрос З 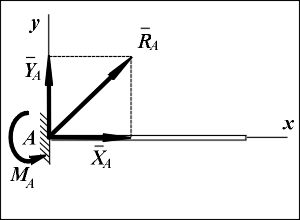 аделка одного тела в другое (например стержня в неподвижную стену) не позволяет данному телу перемещаться и поворачиваться относительно другого. В случае заделки силовая реакция RA не является единственным фактором взаимодействия между телом и опорой. Кроме этой силы реакцию заделки определяет также пара сил с неизвестным заранее моментом MA. Если силу RA представить ее составляющими XA, YA, то для нахождения реакции заделки надо определить три неизвестные скалярные величины: XA, YA, MA. аделка одного тела в другое (например стержня в неподвижную стену) не позволяет данному телу перемещаться и поворачиваться относительно другого. В случае заделки силовая реакция RA не является единственным фактором взаимодействия между телом и опорой. Кроме этой силы реакцию заделки определяет также пара сил с неизвестным заранее моментом MA. Если силу RA представить ее составляющими XA, YA, то для нахождения реакции заделки надо определить три неизвестные скалярные величины: XA, YA, MA.Приведем примеры замены плоских систем параллельных распределенных сил их равнодействующими.
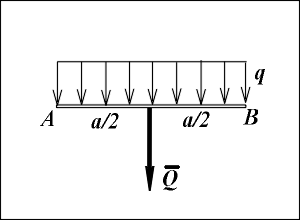
Для такой системы сил интенсивность имеет постоянное значение: q = const. При решении задач статики эту систему сил можно заменять сосредоточенной равнодействующей силой Q, равной по модулю произведению интенсивности q на длину отрезка AB = a ( Q = q · a) и приложенной в середине отрезка AB.
Для такой системы сил интенсивность q является переменной величиной, изменяющейся от нуля до максимального значения qmax по линейному закону. Равнодействующая Q этой системы сил равна по модулю Q =0.5 · a · qmax и приложена в точке K, делящей отрезок AB в отношении AK : KB = 2 : 1. 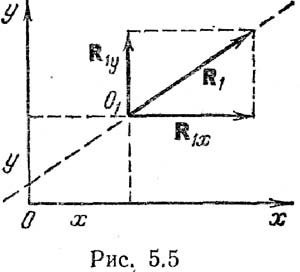 19.Расчет составных конструкций 1.1. Расчет с разделением системы тел на отдельные тела 1.1.1. Систему тел по внутренней связи С разделяют на отдельные тела и рассматривают их равновесие. 1.1.2. От каждого из тел отбрасывают все связи, заменяя их действие реакциями [1, 2]. В заданных механизмах приложены следующие виды связей: неподвижный осевой шарнир (реакцию разлагают на составляющие, параллельные координатным осям X, Y ); подвижныйосевой шарнир (реакция N перпендикулярна опорной поверхности, направлена от нее); жесткая заделка (реакция представляет собой комбинацию реакции неподвижного шарнираX, Y и пары сил с реактивным моментом m ).Составляющие реакции внутреннего шарнира С , приложенные к разным телам системы, по принципу действия и противодействия равны по модулю и направлены противоположно. Распределенную нагрузку заменяют сосредоточенной силой, приложенной посредине интервала и равной модулю произведения интенсивности нагрузки q на длину интервала. 1.1.3. Составляют уравнения равновесия, включающие уравнения проекций на стандартные оси и уравнения моментов (расчетное и проверочное). Центр расчетного уравнения моментов выбирают на пересечении линий действия максимального количества неизвестных реакций, проверочного уравнения – на пересечении линий действия известных сил, через которое не проходит ни одна из непроверенных неизвестных реакций. Рекомендуется уравнения равновесия составлять, рассматривая силы по очереди следующим образом: определяют угол острый α между линией силы и линией одной из осей; проекция силы на эту ось будет содержатьcos α, на вторую ось –sin α; проекция положительна, если угол совмещения вектора силы с осью острый, и отрицательна – если он тупой; определяют плечо силы, опуская перпендикуляр из центра на линию действия силы, и знак момента по направлению поворота плеча силой вокруг центра (при повороте плеча по часовой стрелке момент отрицателен, против - положителен). При произвольном положении силы для определения момента ее разлагают на составляющие, параллельные координатным осям (их величины равны соответствующим проекциям силы) и находят сумму моментов этих составляющих, используя теорему Вариньона [1, 2]. Таким образом, для каждого из тел составляют по 3 расчетных и 1 проверочное уравнение. 1.1.4. Решают систему из 6 расчетных уравнений относительно неизвестных реакций. Подставляют найденные реакции в проверочные уравнения, модуль полученной суммы не должен превышать 0,02 Rср, гдеRср – среднее значение модулей проверяемых реакций. 1.2. Расчет с использованием принципа отвердевания 1.2.1. Заменяют внутренний шарнир С жестким соединением и рассматривают равновесие полученного тела. Вторым рассматривают одно из тел системы (п.1.1.1). 1.2.2. Составляют чертеж для каждого из рассматриваемых тел аналогично п.1.1.2. 1.2.3. Для первого тела составляют 3 расчетные и 1 проверочное уравнение аналогично п.1.1.3. Для второго тела составляют одно расчетное уравнение моментов сил относительно центра С. 1.2.4.Решают систему из 4 расчетных уравнений и делают проверку аналогично п.1.1.4. 2. 2.Расчет с помощью принципа возможных перемещений.Реакции связей определяют, рассматривая их по очереди. 20.Условие равновесия рычага.Устойчивость тел при опрокидывании. Расстояние от точки опоры до прямой, вдоль которой действует сила, называют плечом этой силы. Обозначим F1 и F2 силы, действующие на рычаг со стороны грузов (см. схемы в правой части рис. 25.2). Плечи этих сил обозначим соответственно l1 и l2. Наши опыты показали, что рычаг находится в равновесии, если приложенные к рычагу силы F1 и F2 стремятся вращать его в противоположных направлениях, причем модули сил обратно пропорциональны плечам этих сил: F1/F2 = l2/l1.Устойчивость тел при опрокидывании. Это задачи, возникающие при конструировании различных грузоподъемных механизмов и при расчете безопасных условий их эксплуатации, оговариваемых в правилах по работе с этими механизмами. Особенностью решения этих не очень сложных задач на плоскую систему сил является то, что при их решении не составляются уравнения равновесия. Отдельно определяются:а) опрокидывающий момент ( Мопр )- сумма моментов сил, которые стремятся опрокинуть рассматриваемый механизм относительно некоторой проектирующейся на чертеже в точку оси (точки опоры); в) удерживающий момент ( Муд )- сумма моментов сил, препятствующих опрокидыванию. Для устойчивой работы механизма необходимо, чтобы удерживающий момент с некоторым запасом был больше опрокидывающего. Отношение Муд ,/ Мопр =k принято называть коэффициентом устойчивости. Величина k должна быть, естественно, больше единицы. Для различных грузоподъемных механизмов и для разных условий их работы величина коэффициента устойчивости определяется из СНиП, ТУ и других источников. С учетом этого коэффициента приводятся расчеты величины груза противовеса или его положения на механизме, просчитываются варианты - при каком вылете стрелы и с какими грузами можно безопасно работать. Пример решения одной из задач на устойчивость приведен ниже. Особенно важно уметь выполнять элементарные расчеты на устойчивость в производственных условиях, когда приходится работать с предельными для имеющегося в распоряжении крана грузами. 21 Трение скольжения. Законы трения. Коэффициент трения.Между движущимися телами в плоскости их соприкосновения возникает сила трения скольжения. Обусловлено это прежде всего шероховатостью соприкасающихся поверхностей и наличием сцепления у прижатых тел. В инженерных расчетах обычно пользуются установленными опытным путем закономерностями, которые с некоторой степенью точности отражают действие силы трения. Эти закономерности называют законами трения скольжения (Кулона). Их можно сформулировать следующим образом. 1. При стремлении сдвинуть одно тело относительно другого в плоскости их соприкосновения возникает сила трения F , модуль которой может принимать любые значения от нуля до Fmax, т. е.0<=F<=Fmax . Сила трения приложена к телу и направлена в сторону, противоположную возможному направлению скорости точки приложения силы. 2. Максимальная сила трения равна произведению коэффициента трения f на силу нормального давления N: Fmax=fN. Коэффициент трения f — безразмерная величина, зависящая от материалов и состояния поверхностей соприкасающихся тел (шероховатость, температура, влажность и т. п.). Определяют его опытным путем. Различают коэффициенты трения покоя и трения скольжения, причем последний, как правило, зависит и от скорости скольжения. Коэффициент трения покоя соответствует такоймаксимальной силе трения Fmax, при которой имеется предельное состояние равновесия. Малейшее увеличение внешних сил может вызвать движение. Коэффициент трения покоя, как правило, немного больше коэффициента трения скольжения. С увеличением скорости скольжения значение коэффициента трения скольжения сначала незначительно уменьшается, а затем остается практически неизменным. Значения коэффициентов трения для некоторых пар трения следующие: дерево по дереву 0,4-0,7; металл по металлу 0,15-0,25; сталь по льду 0,027. 3. Максимальная сила трения в довольно широких пределах не зависит от площади соприкасающихся поверхностей. Силу трения скольжения иногда называют силой сухого трения. 22.Угол и конус трения Реакция реальной (шероховатой) связи будет слагаться из двух составляющих: из нормальной реакции и перпендикулярной к ней силы трения . Следовательно, полная реакция будет отклонена от нормали к поверхности на некоторый угол. При изменении силы трения от нуля до Fпр сила R будет меняться от N до Rпр, а ее угол с нормалью будет расти от нуля до некоторого предельного значения (рис. 26). 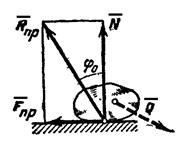 Рис.26 Наибольший угол , который полная реакция шероховатой связи образует с нормалью к поверхности, называется углом трения. Из чертежа видно, что Так как При равновесии полная реакцияR, в зависимости от сдвигающих сил, может проходить где угодно внутри угла трения. Когда равновесие становится предельным, реакция будет отклонена от нормали на угол . Конусом трения называют конус, описанный предельной силой реакции шероховатой связи вокруг направления нормальной реакции. Если к телу, лежащему на шероховатой поверхности, приложить силуР, образующую угол с нормалью (рис. 27), то тело сдвинется только тогда, когда сдвигающее усилие Psin будет больше 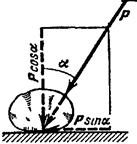 Рис.27 Для равновесия твёрдого тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на твёрдое тело, проходила внутри конуса трения или по его образующей через его вершину. Тело нельзя вывести из равновесия любой по модулю активной силой, если её линия действия проходит внутри конуса трения. 23, Трение качения происхождение трения качения можно наглядно представить себе так. Когда шар или цилиндр катится по поверхности другого тела, он немного вдавливается в поверхность этого тела, а сам немного сжимается. Таким образом, катящееся тело всё время как бы вкатывается на горку.  Рис.33 Вместе с тем происходит отрыв участков одной поверхности от другой, а силы сцепления, действующие между этими поверхностями, препятствуют этому. Оба эти явления и вызывают силы трения качения. Чем твёрже поверхности, тем меньше вдавливание и тем меньше трение качения. Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. 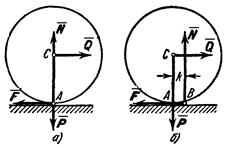 Рис.34 Рассмотрим круглый цилиндрический каток радиуса R и веса , лежащий на горизонтальной шероховатой плоскости. Приложим к оси катка силу (рис. 34, а), меньшую Fпр. Тогда в точке А возникает сила трения , численно равная Q, которая будет препятствовать скольжению цилиндра по плоскости. Если считать нормальную реакцию тоже приложенной в точке А, то она уравновесит силу , а силы и образуют пару, вызывающую качение цилиндра. При такой схеме качение должно начаться, как видим, под действием любой, сколь угодно малой силы . Истинная же картина, как показывает опыт, выглядит иначе. Объясняется это тем, что фактически, вследствие деформаций тел, касание их происходит вдоль некоторой площадки АВ (рис. 34, б). При действии силы интенсивность давлений у края А убывает, а у края В возрастает. В результате реакция оказывается смещенной в сторону действия силы . С увеличением это смещение растет до некоторой предельной величины k. Таким образом, в предельном положении на каток будут действовать пара (, ) с моментом и уравновешивающая ее пара () с моментом Nk. Из равенства моментов находим Пока , каток находится в покое; при начинается качение. Входящая в формулу линейная величина k называется коэффициентом трения качения. Измеряют величину k обычно в сантиметрах. Значение коэффициента k зависит от материала тел и определяется опытным путем. Коэффициент трения качения при качении в первом приближении можно считать не зависящим от угловой скорости качения катка и его скорости скольжения по плоскости. Для вагонного колеса по рельсу k=0,5 мм. Рассмотрим движение ведомого колеса. Качение колеса начнется, когда выполнится условие QR>M или Q>Mmax/R=kN/R Скольжение колеса начнется, когда выполнится условие Q>Fmax=fN. Обычно отношение Если Отношение для большинства материалов значительно меньше статического коэффициента трения . Этим объясняетсято, что в технике, когда это возможно, стремятся заменить скольжение качением (колеса, катки, шариковые подшипники и т. п.). 24.Понятие о фермах и их классификация При больших пролетах и значительных нагрузках балки сплошного сечения становятся экономически невыгодными. В таких случаях их заменяют сквозной конструкцией – стержневой системой (фермой), элементы, которых при узловых нагрузках работают на центральное сжатие и растяжение. Фермой называется геометрически неизменимая система, составленная из стержней, шарнирно соединенных между собой. При расчетах ферм принимают, что узлы являются идеально гладкими, лишенными трения, а оси всех стержней проходят через геометрические центры шарниров. Такой расчетной схемой будем пользоваться на протяжении дальнейшего расчета. На практике обычно ферме придают такое устройство, чтобы нагрузка передавалась на нее исключительно в узлах. При таком устройстве любая нагрузка будет вызывать в любом стержне только продольные усилия. Кроме плоскихферм, у которых оси всех стержней расположены в одной плоскости, применяются пространственные фермы, оси элементов которых не лежат в одной плоскости. Расчет пространственных ферм часто удается свести к расчету нескольких плоских ферм. Расстояние между осями опор фермы называется пролетом. Стержни, расположенные по внешнему контуру фермы, называется поясными, и образуют пояса. Стержни, соединяющие пояса, образуют решетку фермы и называются: вертикальные – стойками, наклонные – раскосами. Расстояние между соседними узлами любого пояса фермы называется панелью. Стержни, ограничивающие контур фермы сверху, образуют ее верхний пояс, а снизу – нижний. Внутренние стержни образуют решетку, вертикальные стержни которой называется стойками, наклонные – раскосами. Расстояние по горизонтами м/у соседними узлами любого пояса называется длиной панели. Классификация: 1) по очертаний поясов; 2) по типу решетки: раскосные, полураскосные, многораскосные с треугольными решетками, с составной (шпренгельной) решеткой; 3) по назначению – мостовые, стропильные, башенные и т.д; 4) по условию опирания – балочные, арочные, консольные, балочно-консольный. |
 илы, равномерно распределенные вдоль отрезка прямой.
илы, равномерно распределенные вдоль отрезка прямой.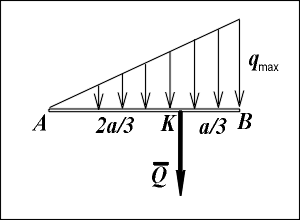 илы, распределенные вдоль отрезка прямой по линейному закону.
илы, распределенные вдоль отрезка прямой по линейному закону.