мануал AIRBUS wilco 280309 v1.3. мануал AIRBUS wilco 280309 v1. Руководство виртуального пилота mfs
 Скачать 25.27 Mb. Скачать 25.27 Mb.
|

|
ВАЖНО: Когда A/THR находится ARM при взлете или уходе на второй круг, на FMA отображается сообщение MAN TOGA или MAN FLX в белом прямоугольнике. Это служит напоминанием экипажу о правильной установке РУД для текущей фазы полета. Режим SPEED/MACH В переменном режиме тяги SPEED/MACH автомат тяги регулирует ее для удержания воздушной скорости (заданной FMGC или установленной на FCU). В режиме SPEED/MACH автомат тяги (несмотря на выставленное значение в FCU) не сможет выйти за действующие ограничения (constraints46) по воздушной скорости для текущей фазы полета: - Для воздушной скорости в режиме SELECTED (выставленной на FCU) - действуют ограничения по VLS и VMAX; - Для воздушной скорости в режиме MANAGED (задаваемой FMGC) - действуют ограничения маневренных скоростей (S, F, Green Dot Speeds). Смена режимов SPEED и MACH между собой производится FMGC автоматически или вручную через нажатие pb SPD/MACH. При этом FMA отображает SPEED или MACH. При заходе на посадку на высоте 3200 футов и выпущенными закрылками в положение «CONF 1» и дальше, логика A/THR в режиме SPEED меняется с тем, чтобы тоньше подстроиться под изменение воздушной скорости. Режим RETARD Этот режим доступен только при посадке в автоматическом режиме (AP должен находиться в режиме LAND). Режим RETARD задействуется на высоте около 40 футах по радиовысотомеру. После касания он задействуется повторно. A/THR выставляет тягу в режим IDLE во время выполнения самолетом «FLARE47» (на FMA и E/WD отобразится сообщение IDLE). Если автопилот отключится во время FLARE после касании ВПП, A/THR из RETARD перейдет в режим SPEED. В этом случае пилоту надлежит вручную уменьшить тягу двигателей. ВНИМАНИЕ: При посадке в автоматическом режиме на высоте 10 футов по радиовысотомеру голосовой автоинформатор объявит «RETARD», подсказывая экипажу перевести РУДы в гейт IDLE для того чтобы подтвердить уменьшение тяги. При иных режимах посадки сообщение RETARD прозвучит как напоминание на высоте 20 футов. Отдельно расскажем о специальном режиме ALPHAFLOOR: его задача - предотвратить последствия фатальных ошибок, допущенных при управлении самолетом. Так, если выводом в первую колонку FCU сообщения A.FLOOR Т  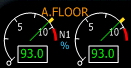 ак, если AOA (Angle Of Attack Protection System) обнаруживает, что самолет занимает критические углы по тангажу (что может вызвать падение воздушной скорости и «сваливание») - автоматически активируется режим с выводом в первую колонку FMA сообщения A.FLOOR. ак, если AOA (Angle Of Attack Protection System) обнаруживает, что самолет занимает критические углы по тангажу (что может вызвать падение воздушной скорости и «сваливание») - автоматически активируется режим с выводом в первую колонку FMA сообщения A.FLOOR. В режиме ALPHA FLOOR:
П Для отключения режима A.FLOOR пилот должен:
Перевод A/THR в положение ARMED До взлета:
В 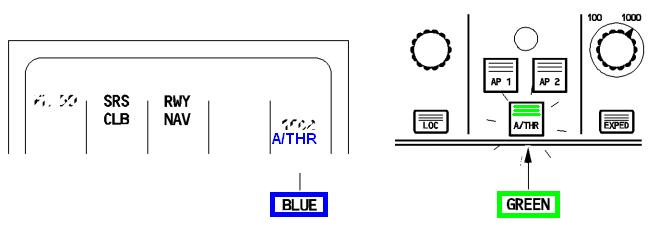 полете: полете:
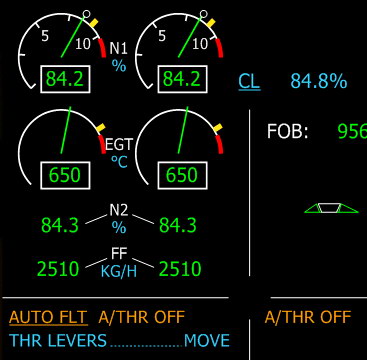
Перевод A/THR в положение ACTIVE Когда A/THR задействован, он работает в фиксированном или переменном режиме, обеспечивая контроль над тягой или воздушной скоростью. При этом позиция РУДов ограничивает A/THR в значении максимальной тяги50.
Особенности перемещения РУДов при задействованном A/THR
Отключение A/THR- DISCONNECT Есть два вида отключения экипажем автомата тяги:
 Блокировка автомата тяги Е Стандартное использование автомата тяги
П
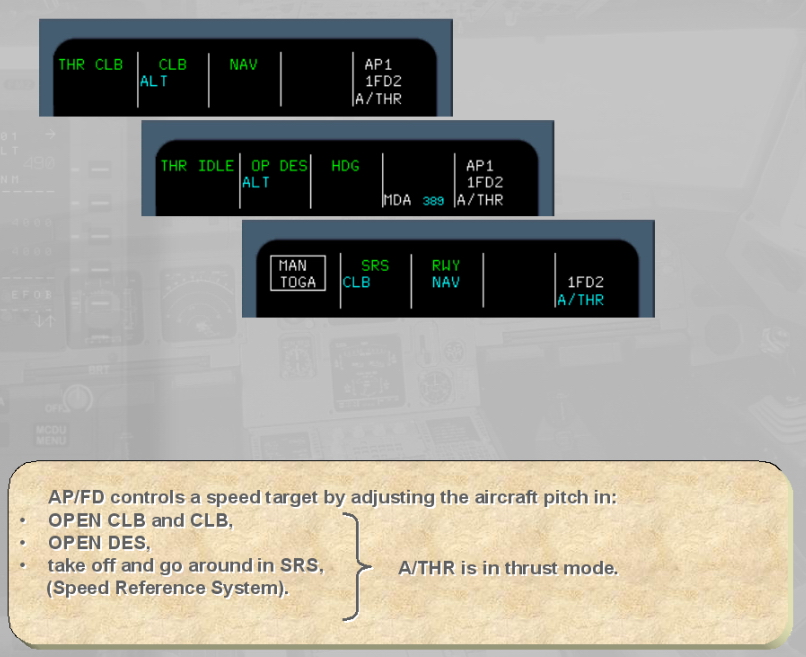
Теперь, когда мы познакомились с функционированием AP/FD и A/THR по отдельности, можно рассмотреть эти компоненты через призму их совместного обеспечения горизонтального, вертикального и скоростного режимов полета. Итак, режим A/THR автоматически согласуется с вертикальными режимами AP/FD:
Особенности взаимодействия AP/FD и A/THR Вертикальные режимы AP/FD могут контролировать предписанную воздушную скорость SPD/MACH или угол тангажа. В свою очередь A/THR может обеспечивать заданную фиксированную тягу двигателей или выдерживать предписанную воздушную скорость SPD/MACH. Тем не менее, AP/FD и A/THR не могут одновременно контролировать воздушную скорость SPD/MACH, поэтому вертикальные режимы AP/FD и A/THR согласуются между собой согласно следующим правилам:
И 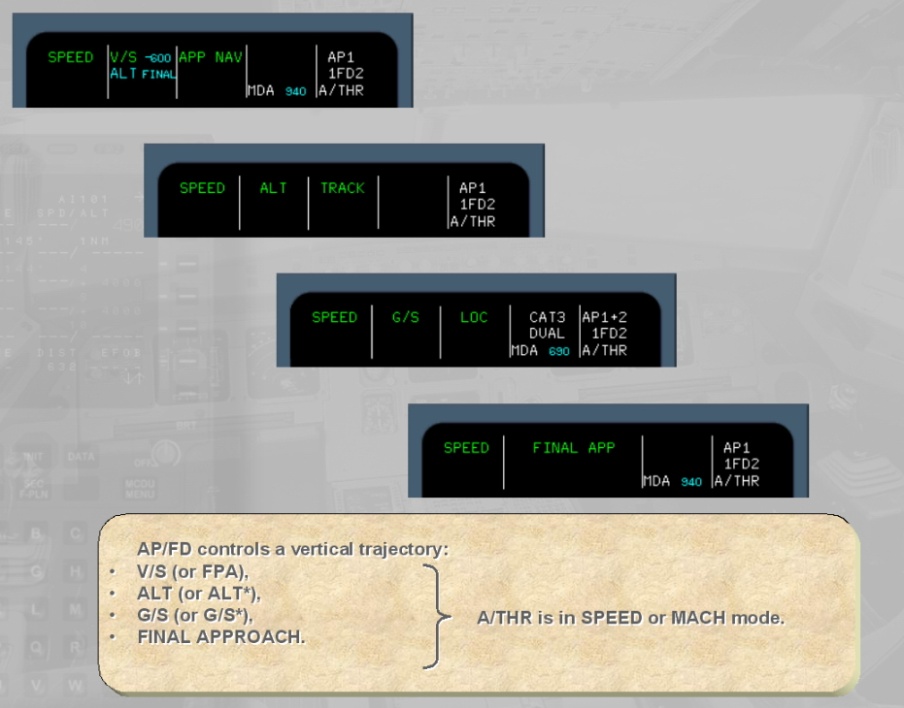 ными словами, выбранный режим AP/FD определяет режим работы A/THR: ными словами, выбранный режим AP/FD определяет режим работы A/THR:
 - этим символом обозначается фаза достижения и начала удержания активным режимом контролируемого параметра: заданной высоты, захвата курсового маяка КГС и т.п. Режимы управления навигацией AP/FD делятся на 2 типа:
Особенности AP/FD в режиме MANAGED
Особенности AP/FD в режиме SELECTED Экипаж работает с этими режимами путем вытягивания соответствующих рукояток на FCU. Горизонтальные режимы AP/FD Эти режимы обеспечивают горизонтальную навигацию полета в соответствии с настройками FCU, сделанными пилотом вручную (режим SELECTED) или планом полета, введенном в FMGC (режим MANAGED). Активный режим горизонтальной навигации отображается зеленым цветом на FMA в третьей колонке; режим, ожидающий активации - синим цветом на второй линии.
M 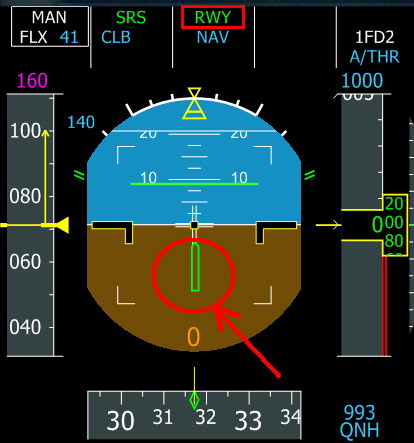 ANAGED-режим RUNWAY (RNW) ANAGED-режим RUNWAY (RNW)На взлете пилот переводит РУД в гейт FLEX или TOGA. В этот момент автоматически активируется режим горизонтальной навигации RWY (runway). Он призван помочь пилоту выдерживать взлетный курс на разбеге в соответствии с курсом ВПП и работает только при условии наличия у ВПП оборудования для захода на посадку по курсо-глиссадной системе (ILS). По достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV (при условии введенного в MCDU плана полета). Е  сли же план полета введен не корректно54 и режим NAV не активировался, то автоматически подключится режим RWY TRK с тем, чтобы при взлете сохранить взлетный курс ВПП и дать возможность пилоту выбрать режим горизонтальной навигации вручную (SELECTED). сли же план полета введен не корректно54 и режим NAV не активировался, то автоматически подключится режим RWY TRK с тем, чтобы при взлете сохранить взлетный курс ВПП и дать возможность пилоту выбрать режим горизонтальной навигации вручную (SELECTED).MANAGED-режим NAVIGATION (NAV) Р  ежим управляет самолетом в соответствии с курсом полета, заложенного в FMGS. Режим разработан так, чтобы свести к нулю разницу между курсом полета и направления носа ВС (HDG и TRACK). Если режим горизонтальной навигации был приведен в ARM до взлета, то по достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV. В полете пилот может задействовать режим NAV нажатием рукоятки HDG (при введенном в MCDU плане). ежим управляет самолетом в соответствии с курсом полета, заложенного в FMGS. Режим разработан так, чтобы свести к нулю разницу между курсом полета и направления носа ВС (HDG и TRACK). Если режим горизонтальной навигации был приведен в ARM до взлета, то по достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV. В полете пилот может задействовать режим NAV нажатием рукоятки HDG (при введенном в MCDU плане).Режим NAV может использоваться используется для возврата на маршрут: - 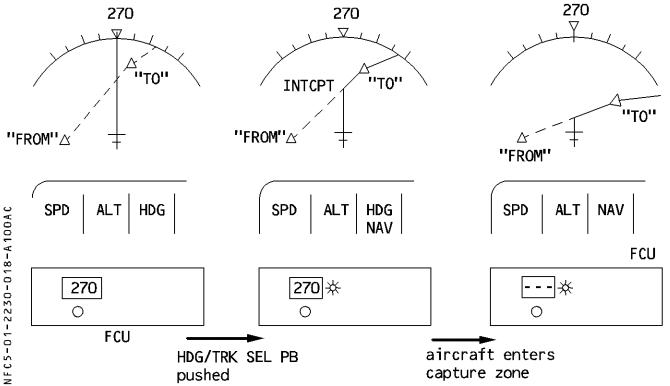 будучи вне трассы, выставляем HDG так, чтобы курс пересекал линию активного участка маршрута; будучи вне трассы, выставляем HDG так, чтобы курс пересекал линию активного участка маршрута;- нажимаем рукоятку HDG: режим NAV переходит в состояние ARM; - при входе ВС в зону перехвата участка трассы, режим NAV из ARM будет задействован автоматически55. Взаимодействие режима NAV с вертикальными режимами AP/FD - Когда задействован режим NAV, вертикальные режимы CLB, DES и FINAL принимают во внимание наличие путевых точек-ограничителей по скорости и высоте56, включенных в горизонтальную часть плана полета MCDU. Если NAV не задействован, а вертикальные managed-режимы не активны, то constraints (CSTR) будут игнорироваться; - При заходе на посадку режим NAV автоматически сменится на LOC при условии, что ILS настроен (введены частота и посадочный курс), самолет находится на высоте больше 400 футов AGL, а режим LOC переведен в ARM. SELECTED-режим HEADING / TRACK (HDG - TRK) Режим задействуется вытягиванием рукоятки V/S на FCU, а выбор между HDG и TRK происходит нажатием pb HDG/TRK - V/S-FPA (подробности см. выше в описании FCU). При взлете режим может быть активирован на высоте выше 30 футов по радиовысотомеру. Вот как отображаются HDG и TRK на Heading Indicator57:
В этом примере мы имеем расхождение в 4º между реальным направлением полета самолета (175) и направлением его носа (179) – самолет «сносит» влево. Это указывает на присутствие легкого бокового ветра с правой стороны. ВАЖНО: Если предположить, что ветер полностью отсутствует, то разницы между режимами HDG и TRK не будет - их символы совпадут друг с другом! Вертикальные режимы AP/FD Режим вертикальной навигации обеспечивает вертикальный профиль полета в соответствии с введенным в FMGC планом (режим MANAGED) или установленными на FCU параметрами (режим SELECTED). Состояние текущего режима показано во второй колонке FMA зеленым цветом, а режима в состоянии ARMED – синим цветом.
Принципы работы вертикальных режимов AP/FD: Если мы хотим изменить текущую высоту, то сначала нужно «накрутить» желаемую высоту, а затем приступить к набору/снижению, выбрав одно из действий:
MANAGED - режим SPEED REFERENCE SYSTEM (SRS) При взлете автоматически активируется режим SRS - (speed reference system). Для этого должны быть выполнены два условия:
Режим SRS обеспечивает максимально эффективный набор высоты после взлета до значения acceleration altitude, введенной в MCDU. Работу режима SRS можно разделить на три фазы: П 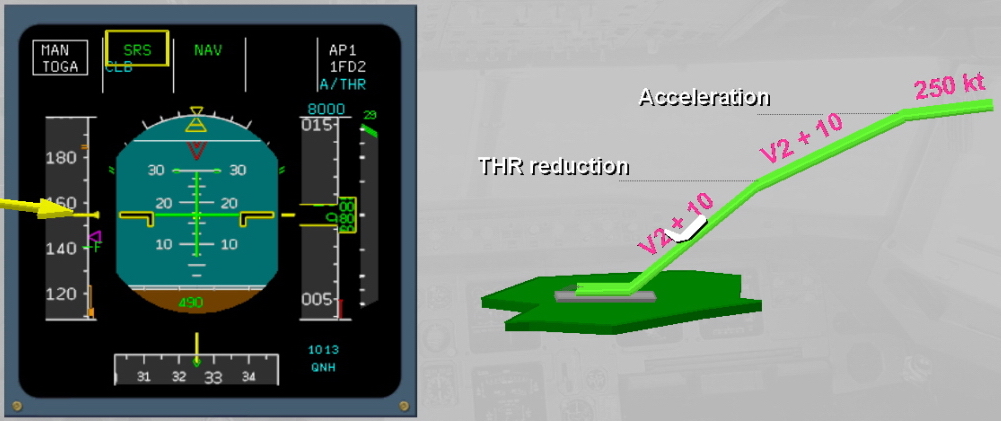 ри взлете с двумя двигателями AP/FD изменением углов тангажа выдерживают воздушную скорость V2 + 10 узлов (отмечена желтой стрелкой) или V2 – если в работе один двигатель. Тяга двигателей соответствует режимам TOGA или FLX, а автомат тяги находится в ARM; ри взлете с двумя двигателями AP/FD изменением углов тангажа выдерживают воздушную скорость V2 + 10 узлов (отмечена желтой стрелкой) или V2 – если в работе один двигатель. Тяга двигателей соответствует режимам TOGA или FLX, а автомат тяги находится в ARM;Н 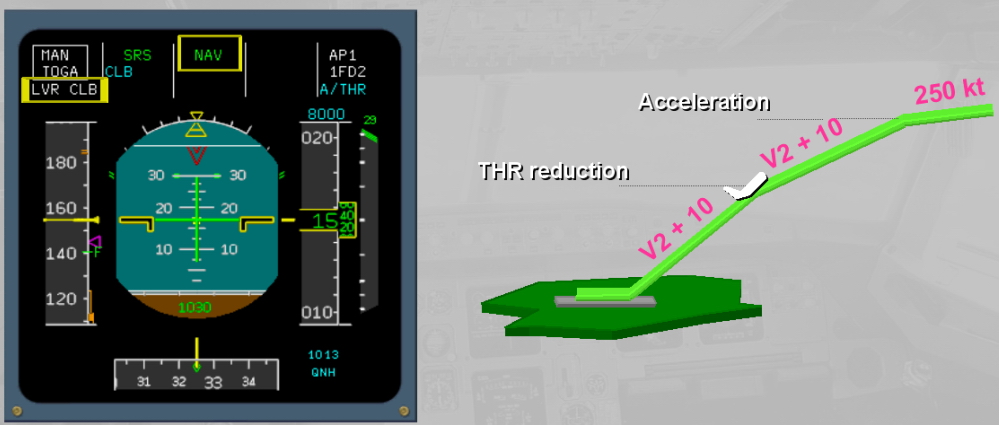 а высоте 30 футов активируется режим NAV. По достижении THR RED ALT пилот переводит РУД в гейт CL (мигает сообщение LVR CLB на FMA). При этом задействуется A/HR. Режим а высоте 30 футов активируется режим NAV. По достижении THR RED ALT пилот переводит РУД в гейт CL (мигает сообщение LVR CLB на FMA). При этом задействуется A/HR. Режим 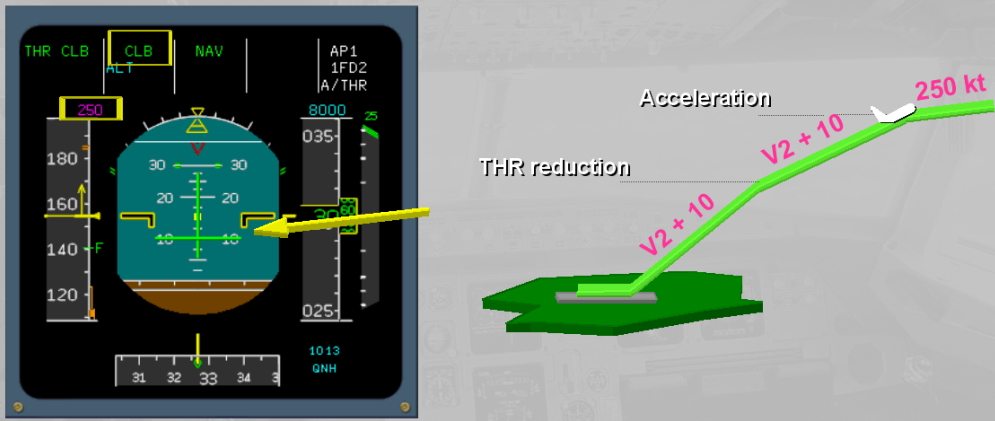 По достижении ACC ALT режим SRS меняется на CLB. FMGS меняет угол тангажа (желтая стрелка) для увеличения воздушной скорости до 250 узлов. Задача пилота – до включения автопилота вести самолет в соответствии с указаниями директоров на PFD. По достижении acceleration altitude, режим SRS автоматически сменится на CLB:  MANAGED - режим CLIMB (CLB) Режим CLB используется для набора высоты - AP/FD управляют самолетом по тангажу для выдерживания воздушной скорости, взятой из MCDU или введенной в FCU, а автомат тяги обеспечивает максимальную тягу набора высоты (MaximumClimbThrust). Режим может быть применен путем выбора на FCU высоты, больше текущей, и нажатием рукоятки ALT. Условием для применения режима является активный режим горизонтальной навигации NAV.При этом набор высоты происходит с учетом имеющихся в плане полета ограничителей (CSTR) по высоте, а также по скорости58. Вертикальный профиль набора высоты может выглядеть следующим образом: 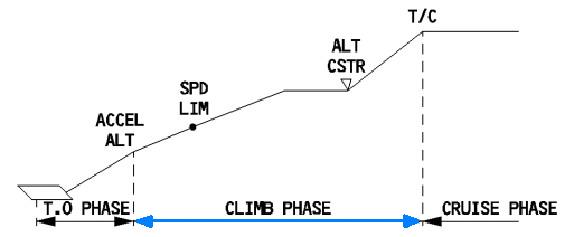 П Будучи задействован, режим CLB соблюдает CSTR: если ALT CSTR ограничивает высоту полета, то режим CLB соблюдает его - по достижении этой высоты дальнейший набор будет остановлен, даже если значение высоты, «накрученной» на FCU, больше действующего ограничения. После отмены действия CSTR, набор высоты будет автоматически продолжен. SELECTED - режим OPEN CLIMB (OP CLB)  OP CLB во многом схож с режимом CLB: он также используется для набора высоты - AP/FD управляют самолетом по тангажу для выдерживания воздушной скорости, взятой из MCDU или введенной в FCU, а автомат тяги обеспечивает максимальную тягу набора высоты (MaximumClimbThrust). OP CLB во многом схож с режимом CLB: он также используется для набора высоты - AP/FD управляют самолетом по тангажу для выдерживания воздушной скорости, взятой из MCDU или введенной в FCU, а автомат тяги обеспечивает максимальную тягу набора высоты (MaximumClimbThrust). Для включения OP CLB нужно:
На примере зеленой линией показан вертикальный профиль набора в режиме OP CLB, а пунктиром - профиль режима CLB (с соблюдением ALT CSTR59). Заметим, что SPD LIM 250/10000 будет действовать для OP CLB при условии, что рукоятка воздушной скорости на FCU находится в MANAGED. Выбранная высота набора будет ограничена значением, указанным на FCU - FL140, несмотря на указанный в MCDU эшелон FL250. ВАЖНО: если высота изменена меньше чем на 1200 футов, то вертикальная скорость будет автоматически ограничена значением 1000 футов в минуту Если в режиме OP CLB нажать pb EXPED, то ВС будет стремиться набирать высоту так эффективно, насколько это возможно, используя для этого скорость Green Dot Speed. MANAGED - режим DESCENT (DES) Режим DES обеспечивает снижение по вертикальному профилю, рассчитанному FMGS. Согласно профилю, самолет начинает снижение с эшелона в точке TOP OF DESCENT (T/D)60, в п Режим DES может быть задействован в любое время путем выбора на FCU высоты, ниже текущей, и нажатием рукоятки ALT. Условием для применения режима является активный режим горизонтальной навигации NAV. Вертикальный профиль снижения основан на управлении в режиме MANAGED скоростными параметрами ВС, и учитывает влияние ветра, вертикальную и горизонтальную части плана полета. Он включает в себя несколько сегментов:
Н  а снижении FMGS вычислит наиболее оптимальную траекторию снижения и стремится следовать ей. При этом на ленте высоты PFD появится индикатор - пурпурное кольцо, показывающее отклонение текущей высоты от рассчитанной компьютером для этого момента снижения. (этот индикатор еще называют «YOYO» а снижении FMGS вычислит наиболее оптимальную траекторию снижения и стремится следовать ей. При этом на ленте высоты PFD появится индикатор - пурпурное кольцо, показывающее отклонение текущей высоты от рассчитанной компьютером для этого момента снижения. (этот индикатор еще называют «YOYO»Для минимизации этого отклонения FMGS через угол тангажа будет регулировать вертикальную скорость, что повлечет за собой и изменение воздушной скорости (несмотря на то, что тяга двигателей находится в IDLE). Воздушная скорость при этом сможет варьироваться +/- 20 узлов от оптимальной. Этот скоростной интервал отображается на ленте воздушной скорости PFD двумя пурпурными символами. Они показывают границы максимальной и минимальной воздушных скоростей, в пределах которых самолет может снижаться в режиме DES. К  ак указано выше, наилучшим моментом для начала снижения с эшелона принято считать пролет автоматически рассчитанной FMGS точки T/D (Top of Descent), отображаемой на ND нисходящей стрелкой (1). ак указано выше, наилучшим моментом для начала снижения с эшелона принято считать пролет автоматически рассчитанной FMGS точки T/D (Top of Descent), отображаемой на ND нисходящей стрелкой (1).Пилот может начать снижение в режиме DES как «до», так и «после» пролета T/D. В этом случае FMGS будет стараться вернуть самолет на вычисленную им траекторию снижения.
Пример индикации PFD и FMA в режиме MANAGED DESCENT: 1- рассчитанная FMGC оптимальная воздушная скорость снижения 2 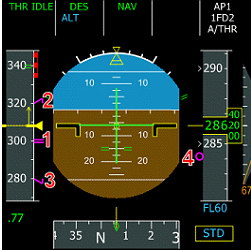 и 3 - допустимые пределы воздушной скорости +/- 20 узлов и 3 - допустимые пределы воздушной скорости +/- 20 узлов4 - индикатор высоты оптимальной траектории снижения, рассчитанной FMGS. Видим, что ВС снижается выше рассчитанного FMGS профиля - об этом сигнализирует индикатор высоты оптимальной траектории. Поэтому FMGC через угол тангажа увеличивает вертикальную скорость, что влечет рост воздушной скорости (показано желтой стрелкой). Заметим, что тяга двигателей находится в IDLE (идет IDLEsegment). SELECTED - режим OPEN DESCENT (OP DES) Р При снижении в режиме OPEN DESCENT включение pb EXPEED приведет к тому, что ВС будет снижаться так быстро, насколько это возможно на скорости 340 узлов/0,80 Max. ВНИМАНИЕ: режим OPENDESCENT не должен быть использован на малых высотах и для захода на посадку! SELECTED - режим Vertical Speed - Flight Path Angle (V/S - FPA) В зависимости от положения pb V/S – HDG или TRK – FPA, этот режим вертикальной навигации контролирует набор высоты или снижение значением вертикальной скорости (V/S) или углом тангажа (FPA). При этом A/THR работает в переменном режиме SPEED, регулируя тягу для обеспечения воздушной скорости, заданной в MCDU или «накрученной» на FCU. Индикация на FPA и FCU будет соответствующая: Пара слов о режиме ALTITUDE HOLD (ALT/ALT CRZ/ALT CST) С 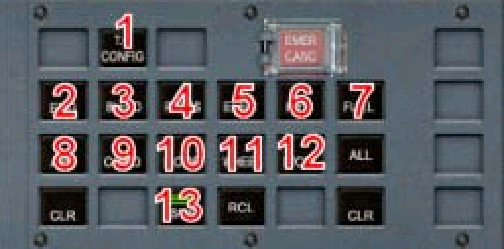 овсем коротко расскажем о панели ECAM, расположенной на пьедестале. По умолчанию, дисплей ECAM отображает информацию в автоматическом режиме. Для вывода информации вручную, нужно нажать соответствующую кнопку на панели ECAM (на кнопке загорится индикатор). Для перевода индикации обратно в автоматический режим, нужно нажать эту кнопку еще раз (индикатор погаснет). овсем коротко расскажем о панели ECAM, расположенной на пьедестале. По умолчанию, дисплей ECAM отображает информацию в автоматическом режиме. Для вывода информации вручную, нужно нажать соответствующую кнопку на панели ECAM (на кнопке загорится индикатор). Для перевода индикации обратно в автоматический режим, нужно нажать эту кнопку еще раз (индикатор погаснет).
Рассмотрим режимы работы EFISCONTROLPANEL 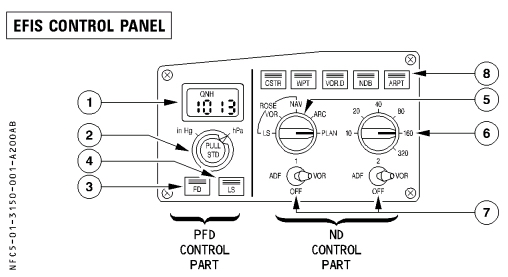
- внешнее кольцо отвечает за выбор единиц измерения давления: гектопаскали или дюймы рт.ст. - внутреннее кольцо служит для установки нужного давления
Уделим внимание панели RMP – RADIOMAMAGEMENTPANEL  RMP расположена на пьедестале со стороны как КВС, так и FO. КВС может через свою панель работать VOR1, а FO через свою – с VOR2. RMP расположена на пьедестале со стороны как КВС, так и FO. КВС может через свою панель работать VOR1, а FO через свою – с VOR2.
 Для использования RMP для радионавигации в режиме Navigation backup mode, экипаж должен нажать кнопку NAV, после чего становятся доступными кнопки VOR, ILS и ADF. После нажатия одной из них нужно установить частоту и курс (только для VOR/ILS) при помощи рукоятки FREQUENCY/COURSE. Выбранная частота отобразится в окошке STANDBY/COURSE: Для использования RMP для радионавигации в режиме Navigation backup mode, экипаж должен нажать кнопку NAV, после чего становятся доступными кнопки VOR, ILS и ADF. После нажатия одной из них нужно установить частоту и курс (только для VOR/ILS) при помощи рукоятки FREQUENCY/COURSE. Выбранная частота отобразится в окошке STANDBY/COURSE: Для того чтобы сделать введенную частоту активной, нажимаем SWAP BUTTON, затем той же рукояткой FREQUENCY/COURSE вводим курс в окне STANDBY/COURSE.  Через несколько секунд индикация курса сменится на резервную частоту VOR/ILS. Для смены частоты VOR/ILS на резервную - нажать SWAP BUTTON, после чего откорректировать ее курс рукояткой FREQUENCY/COURSE. Через несколько секунд индикация курса сменится на резервную частоту VOR/ILS. Для смены частоты VOR/ILS на резервную - нажать SWAP BUTTON, после чего откорректировать ее курс рукояткой FREQUENCY/COURSE.Если же нужно внести изменения в курс текущей частоты VOR/ILS , нужно нажать SWAP BUTTON два раза, а затем откорректировать курс. T  RANSPONDER (бортовой ответчик) и TCAS RANSPONDER (бортовой ответчик) и TCASОтветчик и система TCAS65 также расположены на пьедестале. Ответчик позволяет ввести указанный Службой УВД код ответчика для корректной идентификации ВС,
APM – AUDIOMANAGEMENTPANEL  APM дает возможность экипажу выбрать радиоканалы для прослушивания их через в кабине через динамик APM дает возможность экипажу выбрать радиоканалы для прослушивания их через в кабине через динамик
 Теперь уделим внимание работе систем освещения и внешней световой сигнализации нашего самолета. Теперь уделим внимание работе систем освещения и внешней световой сигнализации нашего самолета.ВНЕШНИЕ ОГНИ
В  НУТРЕННЕЕ ОСВЕЩЕНИЕ НУТРЕННЕЕ ОСВЕЩЕНИЕ
  а  так это выглядит в реальном самолете: так это выглядит в реальном самолете:На этом окончим краткий обзор некоторых систем AIRBUS, но мы будем возвращаться к ним в процессе описания предстоящего рейса. INTENTIONALLY LEFT BLANK INTENTIONALLY LEFT BLANK |

 еревод РУДов ниже гейта CL (или MCT - для одного двигателя) ограничивает тягу двигателей, не отключая A/THR. Это вызовет Лимитацию (ограничение) автомата тяги. В этом случае автоматический контроль тяги будет ограничен положением РУД в этой зоне и не сможет превысить ее. Об этом будет периодически сигнализировать короткий звуковой сигнал, а на дисплее ECAM появится сообщение, указывающее на лимитацию, а в первой колонке FMA будет мигать сообщение «LVR CLB». Для
еревод РУДов ниже гейта CL (или MCT - для одного двигателя) ограничивает тягу двигателей, не отключая A/THR. Это вызовет Лимитацию (ограничение) автомата тяги. В этом случае автоматический контроль тяги будет ограничен положением РУД в этой зоне и не сможет превысить ее. Об этом будет периодически сигнализировать короткий звуковой сигнал, а на дисплее ECAM появится сообщение, указывающее на лимитацию, а в первой колонке FMA будет мигать сообщение «LVR CLB». Для 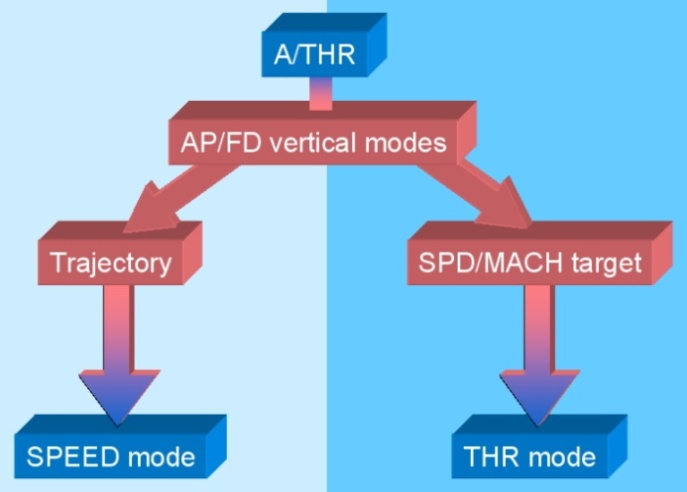 огда AP/FD контролируют вертикальную траекторию, A/THR изменением тяги в режиме SPD/MACH выдерживает заданную воздушную скорость;
огда AP/FD контролируют вертикальную траекторию, A/THR изменением тяги в режиме SPD/MACH выдерживает заданную воздушную скорость; елтая референсная линия указывает курс, по которому направлен нос самолета - HEADING
елтая референсная линия указывает курс, по которому направлен нос самолета - HEADING 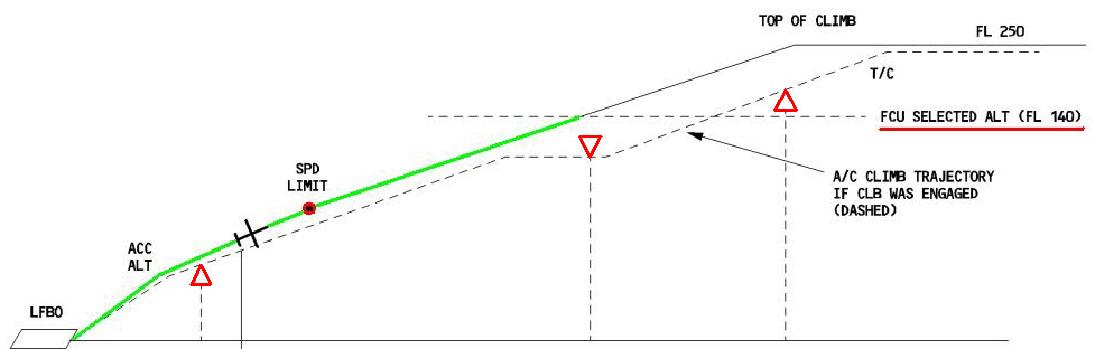 а FCU накрутить высоту, которая будет выше текущей;
а FCU накрутить высоту, которая будет выше текущей;  EOMETRIC segment: AP/FD изменением угла тангажа контролируют вертикальный профиль снижения, A/THR теперь управляет воздушной скоростью через изменение тяги двигателей. Этот сегмент начинается от первого CSTR и продолжается до DECEL POINT.
EOMETRIC segment: AP/FD изменением угла тангажа контролируют вертикальный профиль снижения, A/THR теперь управляет воздушной скоростью через изменение тяги двигателей. Этот сегмент начинается от первого CSTR и продолжается до DECEL POINT. сли снижение к IAF62 начато раньше пролета T/D, FMGS через угол тангажа уменьшит вертикальную скорость до 1000 футов в минуту, и сохранит ее до пересечения самолетом рассчитанной им траектории снижения.
сли снижение к IAF62 начато раньше пролета T/D, FMGS через угол тангажа уменьшит вертикальную скорость до 1000 футов в минуту, и сохранит ее до пересечения самолетом рассчитанной им траектории снижения.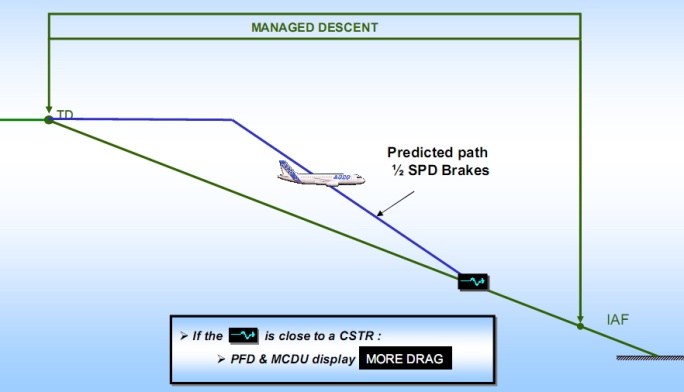 сли снижение начато позже пролета T/D, FMGC через угол тангажа увеличит вертикальную скорость, следя за тем, чтобы воздушная скорость оставалась в рамках +/- 20 узлов от оптимальной. В том случае если ВС снижается со значительным превышением вычисленной автоматикой траектории снижения, FMGS может оказаться не в состоянии перехватить ее, поскольку это вызовет превышение воздушной скорости больше чем на 20 узлов. В этом случае допускается использование воздушных тормозов, которые позволят увеличить вертикальную скорость без увеличения воздушной.
сли снижение начато позже пролета T/D, FMGC через угол тангажа увеличит вертикальную скорость, следя за тем, чтобы воздушная скорость оставалась в рамках +/- 20 узлов от оптимальной. В том случае если ВС снижается со значительным превышением вычисленной автоматикой траектории снижения, FMGS может оказаться не в состоянии перехватить ее, поскольку это вызовет превышение воздушной скорости больше чем на 20 узлов. В этом случае допускается использование воздушных тормозов, которые позволят увеличить вертикальную скорость без увеличения воздушной. евая вращающаяся рукоятка MODE SELECTOR служит для смены следующих режимов отображения на ND:
евая вращающаяся рукоятка MODE SELECTOR служит для смены следующих режимов отображения на ND: LS: пурпурным цветом выводится выбранный курс ИЛС, а также планка отклонения от него. В правом верхнем углу показываются идентификатор ИЛС, курс и частота. Также может быть видна информация TCAS;
LS: пурпурным цветом выводится выбранный курс ИЛС, а также планка отклонения от него. В правом верхнем углу показываются идентификатор ИЛС, курс и частота. Также может быть видна информация TCAS; AV: в режиме ROSE63 выводится план полета, введенный в FMGS. В правом верхнем углу
AV: в режиме ROSE63 выводится план полета, введенный в FMGS. В правом верхнем углу  RC: аналогичен режиму NAV с той лишь разницей, что на вместо ROSE на ND выводится сектор верхней полусферы. Также может быть видна информация TCAS;
RC: аналогичен режиму NAV с той лишь разницей, что на вместо ROSE на ND выводится сектор верхней полусферы. Также может быть видна информация TCAS; LAN: выводит план полета, введенный в FMGS. При этом верх ND всегда ориентирован на север. В центре ND показан ППМ, к которому летит самолет. У пилота есть возможность просмтореть любую точку, указанную в плане полета. Для этого нужно на странице F-PLAN воспользоваться стрелками на блоке MCDU.
LAN: выводит план полета, введенный в FMGS. При этом верх ND всегда ориентирован на север. В центре ND показан ППМ, к которому летит самолет. У пилота есть возможность просмтореть любую точку, указанную в плане полета. Для этого нужно на странице F-PLAN воспользоваться стрелками на блоке MCDU.