мануал AIRBUS wilco 280309 v1.3. мануал AIRBUS wilco 280309 v1. Руководство виртуального пилота mfs
 Скачать 25.27 Mb. Скачать 25.27 Mb.
|

ГЛАВА 4. Предполетная подготовкаПредварительные приготовления окончены, наш самолет на стоянке, темный и холодный. Пассажиры проходят регистрацию и трамбуются в накопитель в ожидании посадки. Теперь начинается самое интересное. С этого момента FS2CREW берет на себя функцию виртуального «оживления» процесса нашего полета. Но обо всем по порядку. Главной функцией FS2CREW является имитация работы второго пилота96, с которым мы, как КВС, будем взаимодействовать в течение всех стадий полета. В основе этого взаимодействия будет лежать чтение и выполнение контрольных карт (Checklists). Также мы будем общаться с экипажем пассажирской кабины (бортпроводниками), и с наземным персоналом в АПвылета и АПназначения. Н  у что ж, поехали! Запускаем симуляцию предполетной фазы FS2CREW: правой кнопкой мыши97 в 2-D кабине щелкаем по кнопке SIDE STICK PRIORITY98, на появившейся панели PANEL SELECTOR выберем кнопку PF (запуск таймера предполетной подготовки)99. По умолчанию он начинает обратный отсчет за 30 минут до готовности к рулению. Если мы не уложимся в отведенное время - ничего страшного. у что ж, поехали! Запускаем симуляцию предполетной фазы FS2CREW: правой кнопкой мыши97 в 2-D кабине щелкаем по кнопке SIDE STICK PRIORITY98, на появившейся панели PANEL SELECTOR выберем кнопку PF (запуск таймера предполетной подготовки)99. По умолчанию он начинает обратный отсчет за 30 минут до готовности к рулению. Если мы не уложимся в отведенное время - ничего страшного. Жмем START, время пошло100:
На информере FsPassengers видим, что пассажиры ожидают открытия дверей. Пока же они закрыты. Ниже, основываясь на мануале FS2CREW, приведем последовательность действий и событий, которые должны произойти за те самые 30 минут102. +30 мин - Экипаж поднимается на борт. Проверяется бортовой журнал, наличие спасательного оборудования, плавсредств и т.п. В роли PNF «оживляем» наш самолет103:
Включение APU:
 Оверхед приобретает такой вид: +28 мин ( Т  акие поля, как Station number (АПвыл.), Flight number (номер рейса), A/C registration (рег.номер ВС) и EZFW (ожидаемый ZFW) уже заполнены109. акие поля, как Station number (АПвыл.), Flight number (номер рейса), A/C registration (рег.номер ВС) и EZFW (ожидаемый ZFW) уже заполнены109. Поля Trip Fuel (количество топлива, которое планируется израсходовать в полете), ATA (время прибытия ВС из крайнего рейса) и STD (ожидаемое время нашего убытия), Trip Time (время в полете) предлагается заполнить самостоятельно, нажимая ЛКМ и ПКМ. +  25 мин ( 25 мин (Получим АТИС: выясним рабочую ВПП110, получим данные по давлению, выставим барометрическое давление на высотомере в «нуль» и затем сверим его с давлением на АПвыл. и т.д. -  на пьедестале включаем Radio master switch (главный переключатель радиооборудования). на пьедестале включаем Radio master switch (главный переключатель радиооборудования). Заодно включим и Marker channel (звуковую сигнализацию пролета маркерных радиомаяков) Начинаем программировать MCDU: основные принципы программирования схожи для большинства иностранных ВС, я же остановлюсь на ключевых отличиях и моментах, требующих пояснений. ВАЖНО: Для ввода информации в MCDU нужно нажать SCROLL LOCK. После ввода данных сразу же отключайте SCROLL LOCK, иначе многие действия с клавиатуры, не имеющие отношения к MCDU, станут невозможными. О цветах символов MCDU:
Начнем со страницы INIT A
К сожалению, WILCO не реализовала опции ввода запасного аэропорта и маршрута к нему, поэтому поля ALTN и ALTN RTE останутся пустыми. Поле CO RTE служит для ввода уже существующего маршрута (см. WILCO: Pilot'sGuide, стр.66). П   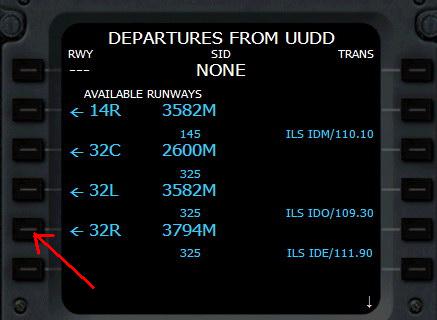 оле INIT B будем заполнять после доставки топливного и грузового манифестов, пока займемся вводом маршрута на странице, вызываемой кнопкой F-PLAN. оле INIT B будем заполнять после доставки топливного и грузового манифестов, пока займемся вводом маршрута на странице, вызываемой кнопкой F-PLAN. Выберем ВПП для взлета (пускай в АТИСЕ указано, что в работе для взлета и посадки ВПП32R) По идее, FO должен ввести ожидаемые схемы выхода и прилета - SID и STAR112. Зная рабочую ВПП 32R и первый ППМ113 - WT, на 99% можно предположить, что SID будет KARTINO 32D (WT 32D) Видим, что после ввода SID в плане появилась первая после АПвыл. точка - 2019 (название идентично высоте пролета точки - по QNH, фактически пройдем ее на 200 метрах или выше). З 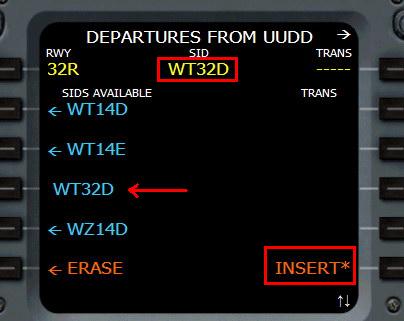 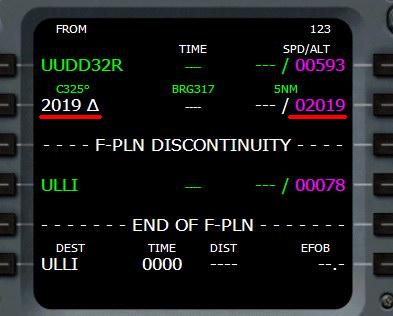 аметим, что справа от АПвыл. и АПназ. также проставлены высоты, обозначающие превышение аэропортов в футах. аметим, что справа от АПвыл. и АПназ. также проставлены высоты, обозначающие превышение аэропортов в футах. П  осле точки 2019 мы должны правым разворотом взять курс на WT и пройти ее на высоте FL49 или выше (см. схему ниже). Введем WT в план: осле точки 2019 мы должны правым разворотом взять курс на WT и пройти ее на высоте FL49 или выше (см. схему ниже). Введем WT в план: 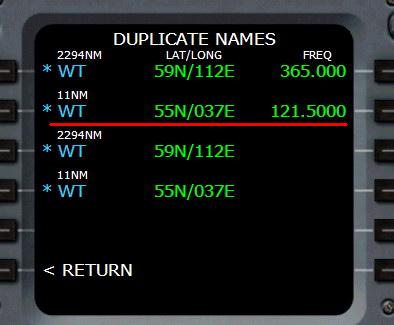 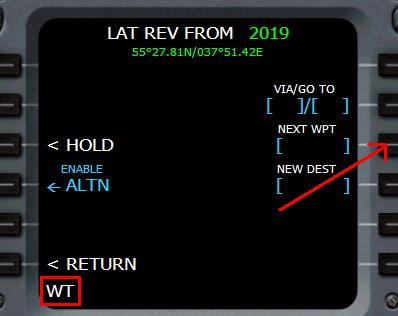 Вспомним, что план FSNAV (как и схема SID) содержат сведения о WT. Этим можно и нужно пользоваться для идентификации других точек. В  НИМАНИЕ: На ND мы можем отслеживать введенные точки. Для этого на EFIS CONTROL PANEL выставим переключатель MODE SELECTOR в положение PLAN и настроим масштаб переключателем RANGE SELECTOR. НИМАНИЕ: На ND мы можем отслеживать введенные точки. Для этого на EFIS CONTROL PANEL выставим переключатель MODE SELECTOR в положение PLAN и настроим масштаб переключателем RANGE SELECTOR.Введя WT, увидим, что план как на ND, так и в MCDU отображен желтым цветом. Это потому, что в этот момент план полета имеет статус временного. Для подтверждения идентифицированной и введенной нами точки КАРТИНО жмем INSERT. После этого план становится постоянным и вновь окрашивается в зеленый цвет. Вот как изменятся при этом SD и MCDU: д  о подтверждения (точка и маршрут желтые) после подтверждения координат (зеленые) о подтверждения (точка и маршрут желтые) после подтверждения координат (зеленые) П    родолжим ввод ППМ в наш план. С точки AR мы должны двигаться по воздушной трассе B239 до точки AJ. Введем это в MCDU - щелкаем ЛКМ по контекстной кнопке слева от введенной AR и введем В239/AJ в поле VIA/GO TO, затем подтвердим изменения нажатием INSERT: родолжим ввод ППМ в наш план. С точки AR мы должны двигаться по воздушной трассе B239 до точки AJ. Введем это в MCDU - щелкаем ЛКМ по контекстной кнопке слева от введенной AR и введем В239/AJ в поле VIA/GO TO, затем подтвердим изменения нажатием INSERT:Заметим, что между введенными нами точками AR и AJ автоматически добавленная точка OBELU. Это из-за того, что она находится внутри участка трассы B239. Вводим оставшиеся точки в план. После ввода крайнего ППМ увидим, что KR от АПназначения отделяет белая прерывистая строка А-PLAN DISCONTINUITY. Это говорит о том, что план хотя и введен, но имеет разрывы (в нашем случае - один разрыв), а значит - после точки KR автоматика не будет знать куда лететь дальше. Представим, что строка DISCO - это высокая стена, из-за которой FMGC не видит следующей точки (хотя она и введена в план). Давайте отодвинем эту стену и избавимся от DISCO: щелкнем ЛКМ по контекстной кнопке слева от DISCO. Теперь наш план готов для полета (останется перед посадкой не забыть ввести схему STAR). Обратим внимание, что в плане справа от каждой точки появились значения скорости и высоты прохождения точки. Также план теперь содержит так называемые pseudo-waypoints - CONSTRAINTS (ограничения), мы их рассматривали в главе, посвященной матчасти. При прохождении CSTR дальнейший полет будет ограничен определенными значениями высоты, скорости т.п. Это могут быть автоматически рассчитанные TOP OF CLIMB (точка окончания набора высоты) и TOP OF DESCENT (точка начала расчетного снижения с эшелона), отображаются на ND белыми стрелками, а в плане эти точки видятся как T/C и T/D. Повторимся: к автоматически созданным CSTR относится точка, ограничивающая скорость полета на определенных высотах - LIM SPD. В соответствии с международными правилами, этот CSTR лимитирует скорость нашего полета до 250 узлов на высоте ниже 10 тысяч футов. Таким образом, этот CSTR дважды будет встречаться в нашем плане полета - при наборе высоты и при снижении. Если путевому пункту маршрута присвоен CSTR вручную, то он также отображается на ND пурпурным кружком114. Для получения на ND дополнительной информации по ограничению на EFIS CONTROL PANEL нужно нажать кнопку CSTR. Вот как это будет выглядеть для точки LEDNI: Д   ля строки CLB SPD LIM (подчеркнутой зеленым) по умолчанию был проставлен CSTR по скорости/высоте - 250/10000. Мы вручную снизили эти значения до 230/9000. ля строки CLB SPD LIM (подчеркнутой зеленым) по умолчанию был проставлен CSTR по скорости/высоте - 250/10000. Мы вручную снизили эти значения до 230/9000. Отдельного внимания заслуживает DECELERATION POINT (DEСEL), отображаемый на ND буквой D в кружке. После ее прохождения автоматика переведет наш полет в фазу APPROACH (заход)115, и самолет начнет снижать скорость до значения GREEN DOT SPEED. Отдельного внимания заслуживает DECELERATION POINT (DEСEL), отображаемый на ND буквой D в кружке. После ее прохождения автоматика переведет наш полет в фазу APPROACH (заход)115, и самолет начнет снижать скорость до значения GREEN DOT SPEED.Рассмотрим эту аббревиатуру подробнее. Значение GREEN DOT SPEED (GDS) рассчитывается компьютером автоматически и не может быть изменено экипажем. GDS отображается символом в виде зеленого кольца на ленте скорости (PFD). Если ВС находится в «clean configuration» (вся механизация убрана) - GDS является так называемой maneuvering speed (эксплуатационной скоростью) и используется для выполнения типовых процедур (например APPROACH или HOLDING - полет в зоне ожидания). При наборе высоты GDS называется best drag-to-lift speed (лучшая скорость набора). GDS также используется при наборе высоты с одним двигателем или в режиме EXPEDITE CLIMB (скоростной подъем)116. Ну что ж - с вводом плана мы разобрались. Продолжим работу с MCDU, ибо КВС скоро вернется в кабину пилотов, а мы еще ни в одном глазу:). Небольшое лирическое отступление: раз уж мы решили лететь как взрослые - нужно быть готовыми ко всему, в том числе и отказу одного из двух двигателей во время взлета (это хорошо эмулируется системой случайных отказов FsPassengers - см. описание программы в архиве мануала). Как известно, именно эта фаза полета наиболее часто приводит к этому виду отказов по причине работы двигателей на максимальных режимах во время взлета. Именно для того, чтобы увеличить ресурс их работы (ну и топлива сэкономить, конечно) и избежать аварийных ситуаций, на AIRBUS часто во время взлета вместо режима автотяги TOGA используют режим FLEX (остановимся на этих режимах позже). Как известно, процедура взлета предусматривает использование трех скоростных величин - V1, Vr и V2. Нас сейчас интересует V1 – СКОРОСТЬ ПРИНЯТИЯ РЕШЕНИЯ: если при разбеге, до того как самолет разогнался до V1, КВС принял решение по каким-либо причинам (к примеру, отказ одного из двигателя) прервать взлет, то процедура экстренного торможения позволит экипажу остановить машину и избежать выката за пределы ВПП117. Но если самолет «перевалил» значение V1 и набирает скорость, то деваться некуда, ибо выкат (а следовательно и все, что с ним связано) неизбежен. А значит - нужно продолжать взлет и бороться с проблемами уже в воздухе, выполняя ENGINE OUT PROCEDURE (процедуру при отказе двигателя), а в случае негасимого пожара или обнаружения (подозрения на наличие) бомбы на борту – то и IMMEDIATE RETURN (процедуру по экстренной посадке). Итак, предположим, что на разбеге по достижении V1 мы обнаружили проблему, представляющую угрозу безопасности полета – отказ одного из двигателей. В этом случае взлет должен быть продолжен (при этом виде отказа необходимо использовать руль направления для удержания ВС на осевой линии ВПП).
- «PAN PAN, PAN PAN, PAN PAN120, AFL117 ENGINE FAILURE» Согласно ФАП ОРС 6.12 диалог экипажа с УВД может выглядеть так: - ТЕРПЛЮ БЕДСТВИЕ, ТЕРПЛЮ БЕДСТВИЕ, ТЕРПЛЮ БЕДСТВИЕ121, «Шереметьево–Круг», Я AFL117, пожар первого двигателя, нужна срочная посадка, нахожусь в районе первого разворота, высота 300, курс 317 - AFL117, «Шереметьево – Круг», удаление 8, время 36, набирайте 900, далее левым разворотом на курс 137, посадка на ВПП32R, давление 756 мм, безопасная высота 30122
- PF объявляет «STOP ECAM» - нажимает рукоятку V/S на FCU (это приведет к окончанию набора высоты и выравнивания ВС) - на F-speed указывает «FLAPS 1», на S-speed – «FLAPS ZERO» - на скорости GREEN DOT вытягивает рукоятку ALT (задействуется режим OP CLB) - переводит РУД в гейт MCT123
Обощим порядок действий при отказе двигателя после V1:
Разберем STANDARTEOPROCEDURE. Она предусматривает:
Отказ двигателя может произойти непосредственно при наборе первоначальной высоты – ENGINEFAILUREDURINGINITIALCLIMBOUT. В этом случае действуем как описано выше с учетом некоторых особенностей:
В  целом же, процедуру взлета при отказе двигателя после V1 наглядно отображает эта схема: целом же, процедуру взлета при отказе двигателя после V1 наглядно отображает эта схема:Теперь рассмотрим порядок действий для экстренной посадки IMMEDIATERETURN. Если экстренная посадка необходима, а метеоусловия позволяют выполнить заход, порядок действий при отказе двигателя такой же, как и при StandardEOprocedure до достижения ACCEL ALT. Далее, после нажатия рукоятки V/S на FCU (для выравнивания самолета «в горизонт») следует:
С  нова смотрим схему, на этот раз – экстренной посадки: нова смотрим схему, на этот раз – экстренной посадки:Отметим что, как правило, при экстренной посадке вес самолета больше максимального посадочного веса. В этом случае принято использовать закрылки в положении «3» для минимизации изменений в посадочной конфигурации при таком коротком заходе на посадку. В этой связи нужно учитывать, что самолет не сможет поддерживать заданную высоту с выпущенными шасси и FLAPS 3, поэтому выпуск закрылков следует производить на посадочной прямой после выпуска шасси. При этом на панели GPWS следует блокировать функцию обнаружения «недовыпуска» закрылков до положения «FULL» переводом в ON кнопки «LDG FLAP 3». Ну что ж, товарищи, все изложенное выше – это конечно хорошо, но как быть нам с вами? Каким образом, летая в симе, следует действовать при отказе двигателя после V1? Если мы летим в онлайне, правильным представляется вариант доклада о случившемся диспетчеру и согласования с ним дальнейших действий – выполнения EO SID, SID или возвращения в аэропорт вылета (так, в условиях дефицита времени наиболее простым решением будет запросить векторение). Н  о в сети ВАТСИМ бывает так, что контроля УВД может вообще не быть, и давать нам указания в экстренной ситуации будет просто некому. В этом случае выполнение EO SID представляется нецелесообразным. Во-первых, далеко не у всех виртуальных пилотов имеются карты аэропортов с EO SID. А во-вторых, уходить в зону ожидания и кружить в ней «до победного», ожидая появления в эфире диспетчера, который нас «посадит», можно довольно долго, пока не выработаем все топливо. А что дальше? Падать с сухими баками? о в сети ВАТСИМ бывает так, что контроля УВД может вообще не быть, и давать нам указания в экстренной ситуации будет просто некому. В этом случае выполнение EO SID представляется нецелесообразным. Во-первых, далеко не у всех виртуальных пилотов имеются карты аэропортов с EO SID. А во-вторых, уходить в зону ожидания и кружить в ней «до победного», ожидая появления в эфире диспетчера, который нас «посадит», можно довольно долго, пока не выработаем все топливо. А что дальше? Падать с сухими баками? Согласно НПП 8.2.3, мы можем продолжить полет по маршруту до ближайшего аэродрома (независимо от его ведомственной принадлежности) и произвести на нем посадку. Полет до АПназ. в нашем случае не предусмотрен127. А можем вернуться и совершить посадку на аэродроме вылета (что является обязательным в случае пожара128). Поэтому если в MFS при вылете у вас отказал двигатель, то наиболее правильным представляется выполнение STANDARD EO PROCEDURE с последующим заходом на посадку в аэропорту вылета по ИЛС - ведь не секрет, что для большинства симмеров при все богатстве выбора из типов заходов на посадку другой альтернативы нет:). Открываем схемы аэропорта Домодедово, лист 31-8A: Точный Заход на посадку CAT II129. Пунктиром отображен порядок действий при уходе на второй круг. В случае отказа (пожара) двигателя при взлете с ВПП32R, этой последовательности будем придерживаться и мы130:
Для того чтобы выполнить эту процедуру, нам нужно настроить частоты ИЛС и ближнего привода (БПРМ). Переместимся на страничку RAD NAV. О 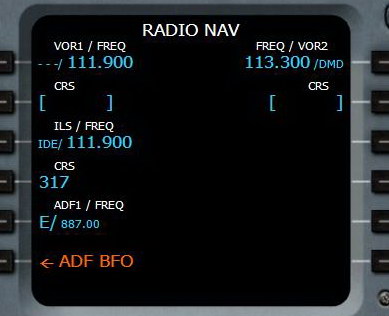 на предназначена для ввода радиочастот NDB, VOR, ILS (для двух последних мы можем ввести еще и курс, что особенно актуально для ILS). на предназначена для ввода радиочастот NDB, VOR, ILS (для двух последних мы можем ввести еще и курс, что особенно актуально для ILS). - В поле введем ILS/FREQ буквенный идентификатор ИЛС - IDE, выберем в появившемся списке нужную частоту (если же мы сначала вводим частоту ИЛС 111,9 - нужно будет выбрать идентификатор132). - В поле CRS введем посадочный курс ИЛС – 317º - В поле ADF1/FREQ введем данные БПРМ – 887 E (ввод осуществляется по аналогии с ИЛС). -  На EFIS Control Panel выставим левый NAVAID133 переключатель в положение VOR. Теперь при переводе Mode Selector в режим ILS, на ND появятся индикация курсового и глиссадного маяков На EFIS Control Panel выставим левый NAVAID133 переключатель в положение VOR. Теперь при переводе Mode Selector в режим ILS, на ND появятся индикация курсового и глиссадного маяков - Там же выставим правый NAVAID переключатель в положение ADF для индикации на ND информации о введенном БПРМ. Ну вот, теперь мы имеем представление о том, что делать в случае отказа или пожара двигателя на взлете. Скорее всего, он пройдет штатно134, но отказ двигателя не должен застать экипаж врасплох. Надеюсь, что и мы, виртуальные пилоты, сможем быть к нему готовы, и диспетчеру ВАТСИМа (если он вдруг появится) не придется краснеть перед иностранными пилотами за наш аэробус, гордо воткнутый морковкой вблизи аэропорта. Теперь переместимся на PERFOMANCE PAGE. При вылете эта страница отвечает за предвзлетную и взлетную135 фазы полета. Введем те значения, которые уже знаем, но сначала давайте разберем подробнее содержимое страницы - начнем слева направо: Скорости V1, VR, V2
- Thrust reduction altitude (высота после взлета, по достижении которой начнется уменьшение мощности двигателей, ее значение зависит от ограничений, предусмотренных АПвыл.) - Acceleration altitude (высота начала разгона ВС - с учетом действующего CSTR до 250 узлов) Оба этих значения зависят от правил уменьшения шума на местности для данного аэропорта. Например, в Домодедово на 450 метрах нужно уменьшить режим двигателей и продолжить набор до 900 м., затем можно разгоняться для уборки механизации до 270 узлов (500 км/ч) до 3000 метров, затем скорость - неограниченна. Тоесть для UUDD THR RED/ACC будут 1500фт/3000фт (450м/900м). ВАЖНО: Если не получается найти оба этих значения, рекомендуется использовать 1500фт/3000фт137;
Д  авайте заполним нашу страничку PERF (performance). Замечу, мы сможем внести не все значения за один раз. Так, V1, VR и V2 укажем после того, как заполним на странице INIT B поля, отвечающие за весовые характеристики. Для этого нам нужно дождаться, пока представители аэродромных служб доставят на борт топливные и загрузочные ведомости (будет далее симулировано FS2CREW). Основываясь на этих данных, FO сможет подсчитать и ввести в MCDU значения V1/VR/V2/Flex/Config and THS. авайте заполним нашу страничку PERF (performance). Замечу, мы сможем внести не все значения за один раз. Так, V1, VR и V2 укажем после того, как заполним на странице INIT B поля, отвечающие за весовые характеристики. Для этого нам нужно дождаться, пока представители аэродромных служб доставят на борт топливные и загрузочные ведомости (будет далее симулировано FS2CREW). Основываясь на этих данных, FO сможет подсчитать и ввести в MCDU значения V1/VR/V2/Flex/Config and THS.Вот что у нас получится: При этом значения F, S, O -speeds (после ввода «весов» на странице INIT-B они автоматически изменят свои значения), FLAPS/THS и FLEX to TEMP пока останутся не измененными. Ну и раз мы уж заговорили о скоростях - вот краткая справка о наиболее используемых:
Ну вот - прошло всего 5 минут, толком ничего еще не сделано, а КВС, закончив обход, уже возвращается в кабину пилотов :) INTENTIONALLY LEFT BLANK |
 аленькие СИМВОЛЫ: автоматически подсчитанные данные
аленькие СИМВОЛЫ: автоматически подсчитанные данные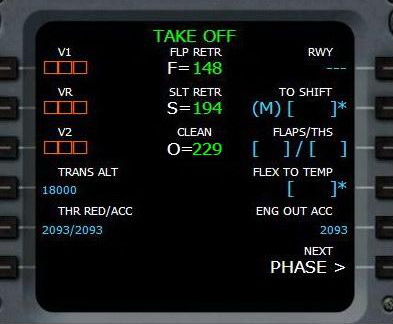 1 - скорость «принятия решения» на взлете. Скорость, до которой самолет еще может безопасно прервать взлетный разбег, а после которой - продолжить взлет при вышедшем из строя двигателе;
1 - скорость «принятия решения» на взлете. Скорость, до которой самолет еще может безопасно прервать взлетный разбег, а после которой - продолжить взлет при вышедшем из строя двигателе;