Курсовой проект по деталям машин. Записка_09.09. Содержание 4 Кинематический и силовой расчет привода 7
 Скачать 2.94 Mb. Скачать 2.94 Mb.
|

13. Расчет элементов приводаСтремясь удовлетворить свои потребности, общество создает новые или совершенствует уже существующие изделия. Этим действия предшествует проектирование. Возможность творческого создания конструкции зависит, прежде всего, от творческих способностей конструктора [5]. 13.1. Натяжное устройство ременной передачиД 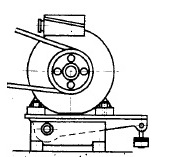 Рисунок 13.1 – Натяжное устройство постоянного действия ля компенсации вытяжки ремней в процессе эксплуатации, компенсации отклонений номинальной длины бесконечного типа ремней, а также легкости «надевания» новых ремней при конструировании ременных передач предусматриваются натяжные устройства [5]. По способам натяжения ремней устройства делятся на [5]: Устройства постоянного действия (рис. 13.1.), где натяжение создается весом груза, узла или пружиной. Устройства периодического действия (рис. 13.2.), где натяжение создается винтом. Устройства, автоматически устанавливающие величину натяжения ремней в зависимости от передаваемого момента (рис. 13.3.). Д 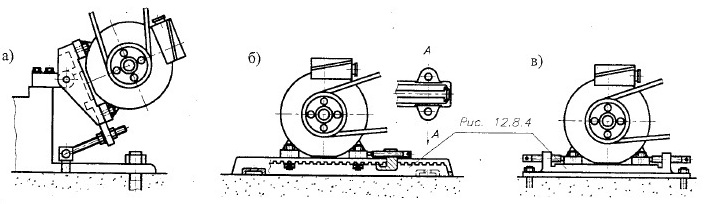 Рисунок 13.2 – Натяжное устройство периодического действия ля проектируемого привода применяем устройства периодического действия. Выбор обоснован простотой и надежностью конструкции по сравнению с автоматическими устройствами (проектируется привод без особых указаний), а также данная конструкция позволяет избежать «перетяжки» ремней в виду непостоянства вращающего момента (смотри график нагрузки) [5, стр. 353]. И 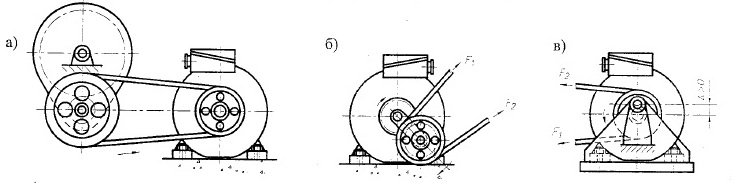 Рисунок 13.3 – Натяжное устройство автоматического действия з устройств периодического действия принимаем указанное на (рис. 13.2. б). Оно значительно проще по конструкции по сравнению с вариантом «в» и в большей степени соответствует кинематической схеме, чем «а». Размеры салазок (рис. 7.4.) принимаем в зависимости от диаметра крепежных болтов для двигателя [5, стр.354]. В нашем случае используются болты М14. Принимаем салазки С-5. О 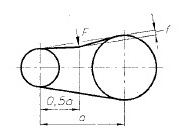 Рисунок 7.5 – схема определения прогиба ветви ремня пределим монтажные требования: Прогиб верхней ветви ремня (рис. 7.5.) под действием силы составляет [5, стр.354]: г 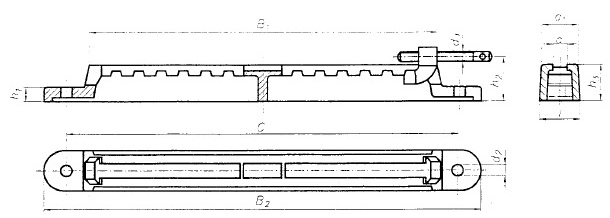 Рисунок 7.4 – Салазки для установки электродвигателя де Подставив, получим: Определим величину силы: для нового ремня 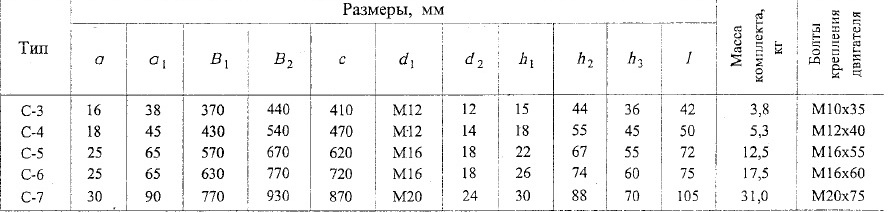 Здесь для нового ремня 13.2. Шкивы ременной передачиРазмеры шкивов клиноременных передач регламентированы ГОСТ 20889-80, ГОСТ 20897-80, размеры профиля канавок – ГОСТ 20898-80. Выбор материала регламентирован скоростью скольжения [5, стр.330]. В нашем случае Определим параметры ступиц шкивов. Исходными данными является диаметр валов. Электродвигателя вал: Быстроходный вал: Допуски и посадки, а так же параметры шероховатости определим согласно рекомендациям [5, стр.339]. |