Составители Богданов В. П., Основы функционирования и эксплуатации средств радиотехнического обеспечения полетов авиации. Таганрог Издво тти юфу, 2014. 104 с
 Скачать 2.63 Mb. Скачать 2.63 Mb.
|

Задачи и классификация радиотехнических систем посадкиДля посадки и взлета ЛА необходимо решать следующие важнейшие задачи: – обеспечение непосредственно самой посадки и взлета ЛА; – организация четкого управления движением ЛА в районе аэродрома; – привод ЛА в район аэродрома посадки. Для их решения функционирует диспетчерская служба аэродрома, которая, кроме того, обеспечивает: – опознавание ЛА; – организацию зоны ожидания с учетом мер, гарантирующих безопасность полетов ЛА в районе аэродрома; – определение порядка роспуска групп ЛА для последовательного выполнения ими посадки; – управление движением ЛА на аэродроме после посадки. Технические средства посадки должны позволять надежно пилотировать самолет к месту приземления по определенной линии планирования – глиссаде (рис. 1.7) и давать ему возможность производить посадку вне зависимости от условий видимости. 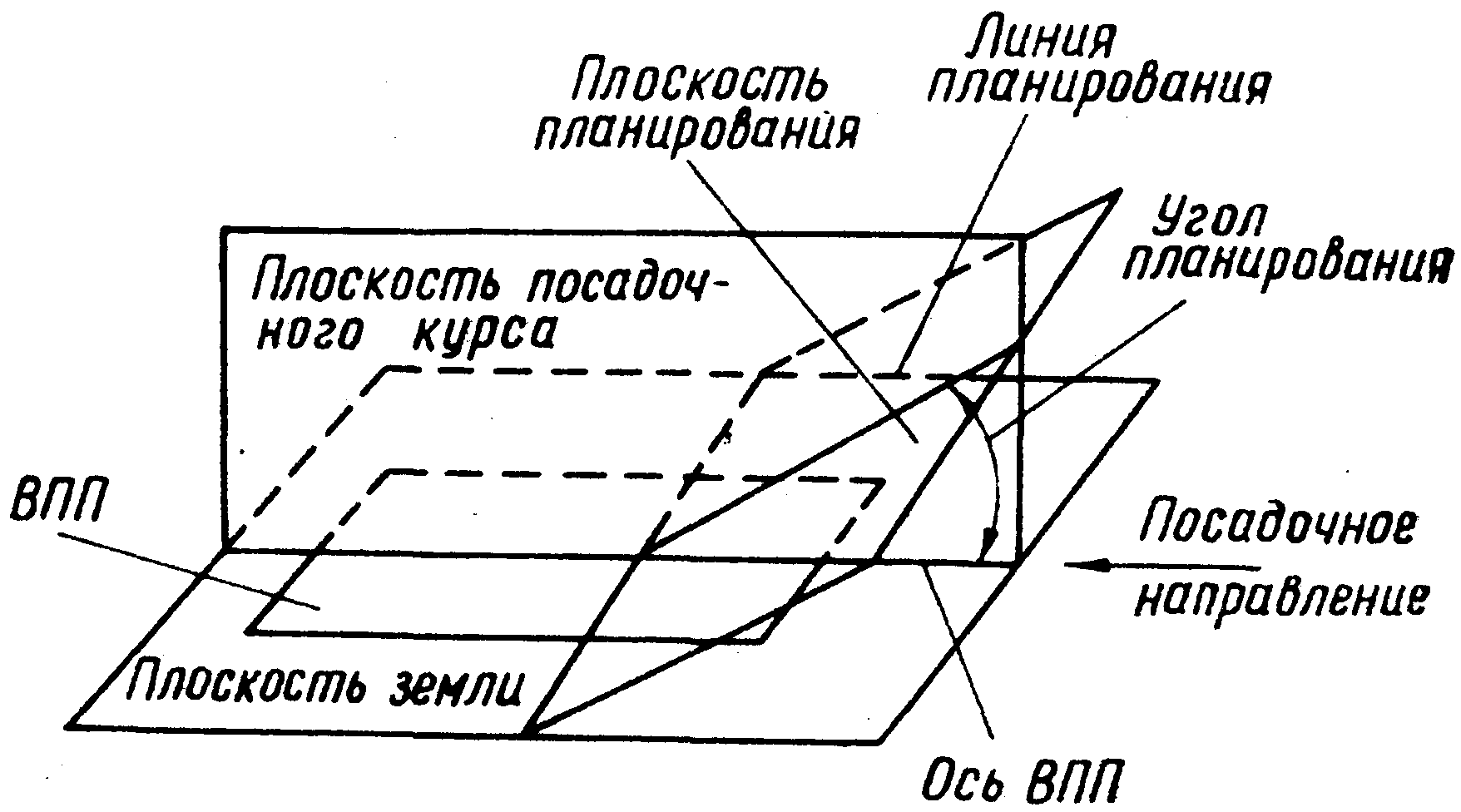 Рис. 1.7. Плоскости посадочного курса и планирования ЛА В посадочную систему входят: группа диспетчерского оборудования включает оборудование для управления воздушным движением в районе аэродрома; группа посадочного оборудования включает устройства, непосредственно обеспечивающие задание линии планирования и измерение дальности. Применяемые в настоящее время системы посадки (СП) классифицируются по нескольким признакам. По назначению СП подразделяются на: стационарные, мобильные и палубные системы. Стационарные СП устанавливаются на стационарных аэродромах и предназначены для длительной эксплуатации без смены места расположения. Мобильные СП удовлетворяют требованиям по средствам доставки, времени свертывания, развертывания и введения в действие. Они развертываются на аэродромах, не оборудованных стационарными СП. Палубные СП служат для обеспечения посадок ЛА с укороченным взлетом и посадкой, а также вертолетов на палубы морских судов. По принципу действия СП делятся на: инструментальные (упрощенные и радиомаячные) и радиолокационные. Радиолокационные СП разделяют на два вида: СП с наземными РЛС, с помощью которых определяются координаты местоположения ЛА и по командам диспетчера, осуществляется управление посадкой. Примерами таких СП могут служить ПРЛ-7, посадочный локатор РСП-6МН. СП с бортовыми РЛС, в которых координаты ЛА определяются на борту. В соответствии с метеоминимумом различают три категории СП, характеристики которых отображены в табл. 1. Таблица 1
Высота принятия решения – это точка на глиссаде, на которой осуществляется переход от полета по приборам на визуальный полет. На этой высоте летчик, должен принять решение о продолжении посадки или уходе на второй круг. Безопасность захода на посадку считается обеспеченной, если отклонения от посадочной траектории таковы, что летчик располагает достаточным временем для вывода самолета в неопасное положение или уход на второй круг. Для этого, например, при ширине ВПП 30 м погрешность определения угла отклонения от линии курса не должна превышать 0,25…0,3° при расстоянии до курсового радиомаяка 5…6 км. Реализовать такую точность сложно из-за отражений сигналов посадочных радиомаяков от местных предметов. Вероятность успешной посадки Рп, т. е. вероятность выхода ЛА на посадочную траекторию с отклонениями, обеспечивающими последующую надежную посадку ЛА, определяется по формуле: Рп = Ра Рт, где Ра – вероятность исправной работы аппаратуры СП; Рт – вероятность точного выхода на посадочную траекторию. Вероятность неудачной посадки Qп определяется по формуле: Qп = 1–Рп. Под неудачной посадкой понимают посадку, оканчивающуюся аварией или катастрофой. В настоящее время установлено, что величина Qп для бортового посадочного оборудования не должна превышать значений 10‑7…10‑8. Для повышения вероятности успешной посадки на ЛА используются п параллельно работающих посадочных устройств (резервирование). Поэтому вероятность полного отказа системы посадки Qac равна произведению вероятностей отказов отдельных устройств Qау и может быть определена по формуле: Qac = Qnау. Резервирование также используется и в наземном оборудовании системы посадки. 1.5.2. Классификация систем посадки В настоящее время применяют три типа систем посадки: упрощенную, радиомаячную и радиолокационную. Упрощенная система посадкиНаземное оборудование такой системы (Рис. 1.8) включает две приводные аэродромные радиостанции (ПАР), два или три маркерных радиомаяка (МРМ). КВ (или УКВ) радиопеленгатор (РП), связные командно-стартовые радиостанции (КСРС) и светотехническое оборудование. МРП и ПАР образуют дальний (ДП) и ближний (БП) приводы. 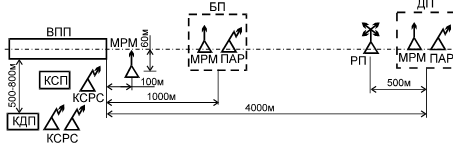 Рис. 1.8. Схема размещения наземного оборудования упрощенной системы посадки. БП – ближний приводной пункт; РП – радиопеленгатор. В составе бортового оборудования используется связная радиостанция, автоматический радиокомпас (АРК), радиовысотомер малых высот, радиоприемник сигналов маркерных радиомаяков (МРП) и пилотажно-навигационные приборы (компас, авиагоризонт, часы и т. д.). Работой системы управляют с командно-диспетчерского (КДП) или командно-стартового (КСП) пункта. Экипаж самолета, подходящего к аэродрому, устанавливает двустороннюю радиосвязь с руководителем полетов и, получив разрешение на посадку на данном аэродроме, сообщает ему о своем местоположении, высоте полета, количестве оставшегося горючего и т.п. Руководитель полетов информирует экипаж об условиях посадки (курс, высота полета в районе аэродрома, метеоусловия и др.). С помощью АРК самолеты приводятся на приводную аэродромную радиостанцию ДП, именуемую дальней приводной радиостанцией (ДПРС). Наиболее точным, хотя и самым продолжительным способом захода на посадку, является построение большой "коробочки" (рис. 1.9). Момент полета над ДПРС фиксируется по сигналам маркерного маяка (два тире в секунду) и поворотом стрелки АКР на 180° . 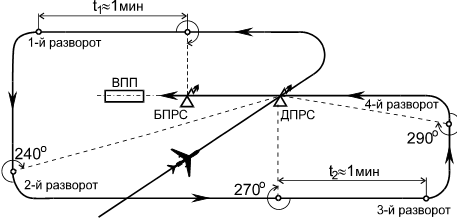 Рис. 1.9. Схема построения большой «коробочки» при заходе на посадку. После пролета ДПРС экипаж выводит самолет на заданный посадочный курс и летит параллельно ВПП. АРК переключается на волну ПАР БП, называемой ближней ПАР (БПРС). После пролета траверзы БПРС (КУР=270° ) экипаж продолжает полет тем же курсом в течение примерно 1мин. После этого производится разворот на 90° и АРК переключается на волну ДПРС. Когда КУР ДПРС станет равным 240°, делается разворот на 90° и продолжается полет по новому курсу. При прохождении траверзы ДПРС (КУР=270°) фиксируется время и примерно через 1мин выполняется третий разворот на 90°, после чего полет продолжается до установления КУР ДПРС, равного 290°. В этот момент осуществляется четвертый разворот, после которого самолет выходит на курс посадки. С курсом посадки производится полет на ДПРС и пробивание облачности. Правильность курса можно проверить, переключая АРК на БПРС; при этом стрелка АРК должна оставаться на нуле. К ДПРС самолет должен подойти на высоте H1»200м, что контролируется с помощью радиовысотомера. После этого АРК переключается на волну БПРС и продолжается дальнейшее снижение. В момент пролета БПРС (сигналы ближнего МРМ - шесть точек в секунду) высота должна быть H2»50¸80м. Дальнейшее снижение осуществляется при визуальной ориентировке по наземному светотехническому оборудованию системы. Над маркерным радиомаяком (если он установлен), расположеннным в 100м от ВПП (см. рис. 1.8), самолет должен пролететь на высоте H3»15м. Наземный РП служит для контроля положения самолетов относительно аэродрома и осуществляет расчет захода на посадку, например, при выходе из строя АРК. В последнем случае экипаж управляет самолетом по командам с земли. Упрощенная система посадки может использоваться при наличии горизонтальной видимости не менее 500-1000м и высоте нижней кромки облаков не ниже 60-80м. Пропускная способность системы 15-20 самолетов в час. Контроль и управление движением самолетов во внешней зоне, в районе аэродрома и при посадке система не обеспечивает, что является ее существенным недостатком, так как не гарантируется безопасность полета при наличии большого количества самолетов в воздухе. Преимуществом упрощенной системы является простота оборудования, дающая возможность применять ее для любых типов самолетов и аэродромов. | |||||||||||||||||||||