Все ответы по госам. Сучкорезные машины лп30Б и лп 33. Конструкция механизмов протяжки и обрезки сучьев. Характеристики машин, приемы работы на них
 Скачать 15.99 Mb. Скачать 15.99 Mb.
|

|
51) Полуавтоматическая линия ЛО-15А. Технологическая компоновка, устройство механизма пиления и приёмного стола. Техническая характеритика. 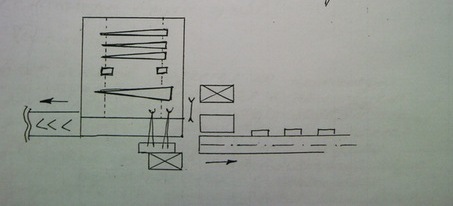 ЛО-15А предназначена для машинной раскряжевки хлыстов программным методом. Технология: пачка хлыстов с лесовозного автопоезда или из запаса краном перемещается на приемную эстакаду. РРУ разобщает пачку и осуществляет поштучную подачу хлыстов в зону действия манипулятора. Двухстреловой манипулятор захватывает хлыст и помещает его на подающий цепной транспортер. Прижимной ролик центрирует и фиксирует хлыст. Оператор пилы оценивает хлыст и задает программу раскряжевки. Включается маятниковая пила и осуществляется раскряжевка. Полученный сортимент попадает на приемный стол, откуда перемещается на цепной транспортер и попадает в лесонакопитель. Установки располагаются под краном (в пролете) ЛТ-62 и могут располагаться как в пролете так и под консолями крана ККЛ-32. взаимное расположение может быть как параллельным, так и зеркальным. 52) Подъёмно-транспортные машины непрерывного действия в лесной промышленности. Классификация. Элементы конструкции транспортёров с гибким тяговым органом. Марки транспортёров и их характеристики. Продольные лесотранспортеры предназначены для перемещения штучных лесоматериалов в продольном направлении. Штучные лесоматериалы весьма разнообразны по форме и размерам. Одни из них (хлысты, бревна, дровяное и другое дол-готье) имеют значительную длину, другие (рудстойка, балансы, кряжи, дрова) характеризуются сравнительно малой длиной. Это оказывает влияние на положение груза на рабочих органах лесотранспортера. В зависимости от расстояния между рабо чими органами iи длиной штучных лесоматериалов / возможно несколько вариантов расположения груза на лесотранспортере, определяющих его тип. 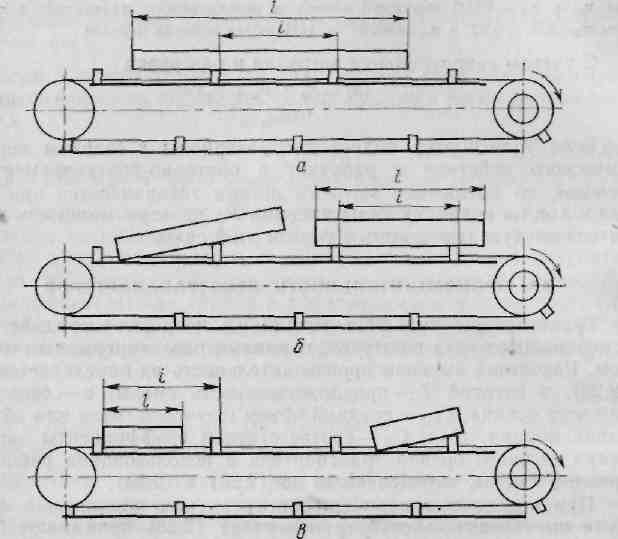 Рис. 10.1. Типы продольных лесотранспортеров: а — несущий; б — полунесущий, в — скребковый У первого из них, называемого несущим лесотранспортером (рис. 10.1, а), лесоматериалы лежат на рабочих органах, это возможно лишь при условии, что l/2>i . У несущего лесотран спортера весь вес груза передается на неподвижную опору через рабочие органы. Если длина лесоматериала l будет больше i, но l/2>i, груз может лежать на двух рабочих органах или только на одном из них (рис. 10.1,6). В последнем случае один конец груза перемещается по лотку. Такие лесотранспортеры называются полунесущими. Если расстояние между рабочими органами iбольше длины лесоматериала, т. е. i>l, груз будет лежать между рабочими органами на дне лотка (рис. 10.1,в). Такие продольные лесотранспортеры являются скребковыми. У них вес груза передается на дно лотка, поэтому для него коэффициент сопротивления движению при qrследует принимать wr = Поперечные лесотранспортеры перемещают груз (хлысты, бревна, шпалы, доски) в направлении перпендикулярном его длине, поэтому они имеют две или несколько параллельных цепей с рабочими органами. Число цепей принимается в зависимости от длины перемещаемых лесоматериалов. Если лесоматериалы имеют одинаковую длину, то для их перемещения достаточно иметь две параллельные цепи. Расстояние между цепями b= (0,6.. .0,8)/ В зависимости от способа перемещения груза различают три типа поперечных лесотранспортеров: несущие (см. рис. 12.1,а), скребковые с верхней рабочей ветвью (рис. 12.1,6) и скребковые с нижней рабочей ветвью (рис. 12.1,б). В первых из них груз лежит на тяговых или рабочих органах и вместе с ними перемещается по общей опоре, при этом коэффициент сопротивления движению будет одинаков как для рабочего органа, так и для перемещаемого груза. В скребковых транспортерах груз лежит на неподвижной опоре и перемещается по ней рабочими органами верхней или нижней ветви. Если рабочая ветвь верхняя, то тяговый орган вместе с рабочими органами находится под грузом и перемещается по опоре, которая проходит под опорой груза. В случае, когда рабочей ветвью является нижняя, тяговый и рабочий органы находятся над грузом, при этом, как видно из рис. 12.1, в, изменяется и положение опор для груза и тягового органа. Выбор типа поперечного транспортера оказывает влияние на сопротивление движению груза и условия его эксплуатации. Скребковые лесотранспортеры с верхней ветвью применяют для подачи лесоматериалов под пилы. В отличие от несущих лесотранспортеров они выравнивают лесоматериалы, придавая им строго поперечное положение .по отношению к цепям. В скребковых лесотранспортерах с нижней рабочей ветвью при наличии люков в нижней неподвижной опоре для груза можно производить автоматическую разгрузку по всей длине такого транспортера и применять его для сортировки лесоматериалов. 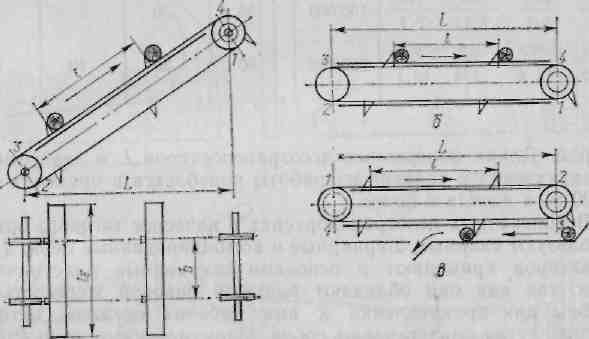 Рис. 12.1. Типы поперечных лесотранспортеров Поперечные несущие лесотранспортеры находят применение при передаче лесоматериалов от одного транспортного устройства или станка к другому, а также для сортировки пиломатериалов (досок). Поперечные элеваторы применяют при перегрузке круглых лесоматериалов с одного продольного лесотранспортера на другой, расположенный на другом уровне, а также для погрузки лесоматериалов и выгрузки их из воды. Элеваторы, короткие несущие и скребковые лесотранспортеры с верхней рабочей ветвью имеют свободно провисающую нижнюю ветвь, а в длинных она поддерживается неподвижной опорой. Длина поперечных лесотранспортеров Lв зависимости от назначения и условий их работы колеблется в пределах от 2 до 20 м, а иногда и более. В поперечных лесотранспортерах в качестве тягового органа используют сварные, шарнирные и комбинированные цепи, а для элеваторов применяют в основном шарнирные пластинчатые цепи, так как они обладают большой боковой жесткостью и удобны для прикрепления к ним рабочих органов, которые в этом случае представляют собой видоизмененные звенья цепи. В горизонтальных поперечных несущих лесотранспортерах для шпал и досок груз лежит непосредственно на цепях, а рабочие органы отсутствуют. В качестве рабочих органов поперечных лесотранспортеров и элеваторов применяются различные крюки, устройство которых зависит от формы груза и угла его подъема. В поперечных лесотранспортерах обычно применяются винтовые натяжные устройства. Конструкция ведущих и направляющих звездочек выбирается в соответствии с типом тяговой 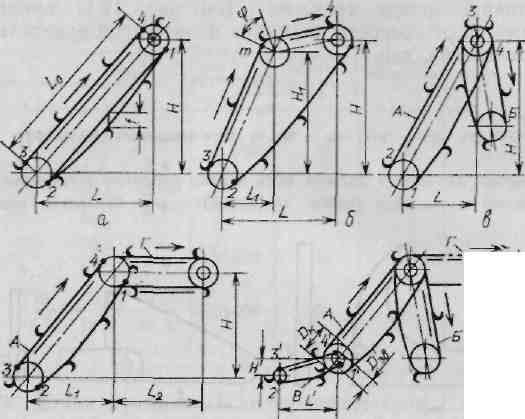 цепи. цепи.Рис. 12.3. Схемы поперечных лесотранспортеров и элеваторов Поперечные лесотранспортеры и элеваторы имеют одну или несколько секций различных по устройству и назначению Устройство лесотранспортера с гибким тяговым органом. Определение тягового усилия и полного натяжения тягового органа лесотранспортера. Транспортеры подразделяются по типу тягового устройства, виду лесного груза и способу его перемещения. По типу тягового устройства различают: транспортеры с гибким тяговым органом, винтовые, роликовые транспортеры, водяные транспортные лотки и пневматические транспортные установки. 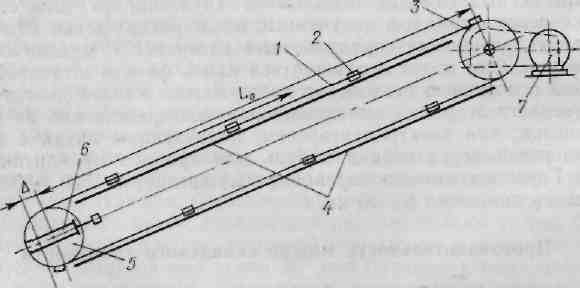 Рис. 9.1. Схема транспортера с гибким тяговым органом: 1 — тяговый орган; 2 - рабочий орган,; 3 — тяговое (ведущее) колесо; 4 — неподвижные опоры; 5 — направляющее колесо; 6 — натяжное устройство; 7 — привод Наиболее распространенным типом транспортного устройства непрерывного действия являются транспортеры с гибким тяговым органом, в качестве которого применяют цепь, ленту или канат. Общая схема транспортера с гибким тяговым органом представлена на рис. 9.1 и включает замкнутый тяговый орган, два концевых колеса, натяжное устройство, неподвижные опоры и привод. Тяговый орган огибает концевые колеса, на нем для захвата груза закреплены рабочие органы. Концевое колесо приводящее в движение тяговый орган называется тяговым или ведущим, а колесо, только изменяющее направление движения тягового органа, носит название направляющего. Обе ветви тягового органа или одна из них поддерживаются неподвижной опорой. Для натяжения тягового органа применяют натяжное устройство. Движение ведущему колесу и через него тяговому органу передается от привода транспортера. Тяговый орган приводит в движение перемещаемый груз. В процессе работы он огибает концевые колеса, поэтому должен быть достаточно гибким, прочным, иметь малый вес и быть удобным для прикрепления к нему рабочего органа. Всем этим требованиям в той или иной мере отвечают цепи, ленты и проволочные канаты. Наибольшее распространение имеют цепи, конструкцию которых приспосабливают к типу транспортного устройства. Они более гибки, чем канаты и ленты, более прочны и удобны для прикрепления к ним рабочих органов. К недостаткам их относят сравнительно большой вес и неравномерность движения, что вызывает динамические нагрузки и ограничивает возможность применения больших скоростей. Ленты и канаты менее приспособлены к условиям работы тягового органа, к ним трудно прикреплять рабочие органы, они обладают большей жесткостью* а ленты, кроме того, имеют и малую прочность. Перед работой тяговый орган — цепь, канат или ленту натягивают с силой So, представляющей собой первоначальное, или монтажное, натяжение, создаваемое с помощью натяжного устройства. К тяговому органу во время движения от ведущего колеса передается тяговое усилие Т, поэтому натяжение тягового органа в любой точке по его длине равно Sn = Tn + S0,(9.52) где Гп и Sn — тяговое усилие и натяжение в точке п. Тяговое усилие в конце какого-нибудь участка тягового органа равно сумме сопротивлений на этом участке Таким образом, тяговое усилие в какой-либо точке тягового органа есть сумма сопротивлений предшествующих участков этого органа. Тяговый орган работает на растяжение, поэтому тяговое усилие не может быть отрицательным, если даже сопротивления будут отрицательными, поэтому необходимо определить порядок суммирования сопротивлений. Для того чтобы тяговое усилие всегда было положительным, необходимо начать суммирование сопротивлений от той точки тягового органа, где тяговое усилие равно нулю, а натяжение тягового органа наименьшее, т. е. Sn = So. В горизонтальных транспортерах такой нулевой точкой для тягового усилия будет точка сбегания тягового органа с ведущего колеса. В транспортерах с наклонными участками, сопротивление на этих участках может быть положительным и отрицательным. Если ца нижней ветви (см. рис. 9.7, а) сопротивление P1-2 >0, т. е. положительно, то нулевой точкой в этом случае будет точка 1 и Т1 = 0. Напротив, если P1-2 <0 и сопротивление P1-2 отрицательно, то тяговое усилие будет равным нулю в точке 2, т. е. Т2 = 0. Таким образом, для определения тягового усилия и суммирования сопротивлений необходимо определить знак суммы сопротивлений холостой ветви тягового органа и по этому знаку установить положение нулевого значения тягового усилия. От этой нулевой точки и суммируются сопротивления движению отдельных участков. Для схемы на рис. 9.7, а нулевое значение тягового усилия возможно в точке / или 2. Для первого случая, когда P1-2 >0 или wL>H,— нулевая точка 1, поэтому Т1 = 0 и натяжение S1 = S0. Тяговое усилие в точке 2 T2 = P1-2 и натяжение S2 = P1-2 + S0. Тяговое усилие в точке 3 равно сумме сопротивлений на криволинейном участке 2—3 и тягового усилия в точке 2, т. е. Тз = P2-3 + Т2или Тз = P1-2 + P2-3. Так как участок 2—3 криволинейный, то сопротивление на нем является сопротивлением направляющего колеса, т. е. P2-3 =Pн и Sн = S2 поэтому P2-3= CKS2 или P2-3= CK(P1-2 + So). Тяговое усилие в точке 4 Т4=Т3 + P3-4, т. е. Т4= P1 - 2 + P2 - 3 + P3 – 4 или Т4= P1 - 2 + CK(P1-2 + So). + P3 – 4 Подставив значения P1-2 и P3-4 из Т4 = Наибольшее тяговое усилие будет в точке 4, т. е. в точке набегания тягового органа на ведущее колесо. График изменения тягового усилия по длине тягового органа между точками 1, 2, 3 и 4 приведен на рис. 9.8, а. Из него видно, что тяговое усилие в точке 4 для первого случая равно сумме сопротивлений на трех участках. 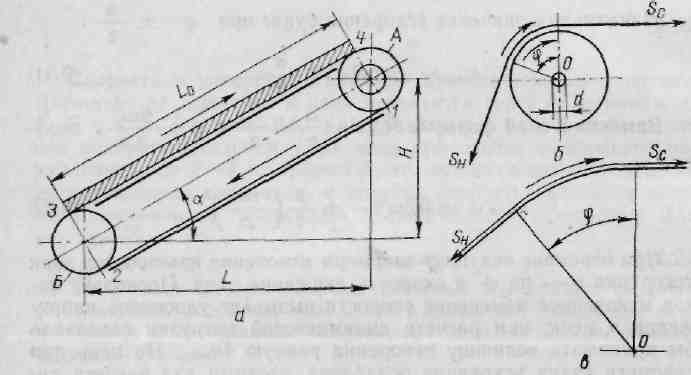 В формуле (9.54) первое слагаемое 2qTwLпредставляет собой сопротивление движению самого тягового органа, коэффициент 2 указывает, что в расчет принята сумма длин обеих ветвей тягового органа. Второе слагаемое qг{wL + H)—сопротивление движению перемещаемого груза, в котором qгwL— сопротивление трения и qгH— сопротивление подъема. Третий и последний член с коэффициентом Скпредставляет собой сопротивление направляющего колеса. Так как третье слагаемое составляет 1... 2 % от общего тягового усилия, то для приближенных расчетов можно принять Ск = 0 и тогда Рис. 9.7. Расчетные схемы для определения сопротивления движению T4==2q Для второго случая, когда P1-2 <0 или wL<H, суммирование сопротивлений следует вести от точки 2, так как для нее тяговое усилие Т2 = 0 и натяжение S2 = S0. Тяговый орган на участке 1—2, двигаясь вниз под действием силы тяжести, будет производить натяжение в точке 1, равное T1 = P1-2 или Т2 = -qт(wL - H).). Тяговое усилие в точке 3 Т3 = P2 - 3, где P2 - 3 — сопротивление криволинейного участка 2—3, т. е. сопротивление направляющего колеса, определяемое по формуле P2 - 3 = Pк = СКS2; так как S2 = So, то P2 - 3 = CKS0и T3 = CKSo. Тяговое усилие в точке 4 при набегании тягового органа на ведущее колесо составит T4 = Тз + P3 – 4 или Т4 = P2 - 3 + P3 – 4 .Подставив значение P3 – 4 из Т4=CKSo+ Следовательно, для второго случая, когда P1-2 <0, тяговое усилие в точке 4 равно сопротивлению только двух участков 2—3 и 3—4. График тягового усилия для этого случая представлен на рис. 9.8,6. Таким образом, при P1-2>0 и P1-2 <0 тяговое усилие Т4 в точке 4 имеет разное значение. Более сложная схема транспортера представлена на рис. 9.8, в. Она отличается от предыдущей (см. рис. 9.7, а) тем, что на обеих ветвях для изменения направления движения тягового органа имеются шины А и В выпуклого профиля. Вследствие этого появляются дополнительные сопротивления движению Раи Ръ, приложенные в точках А и В. Приближенно можно принять, что натяжение в точке А равно Sa= Ta+So, где Та = P1- A, или по формуле Так как P1-а + Pа-2 = P1-2 и P3-b + Pb-4 = P3-4 , то Т4= P1-2 + P2-3 + P3-4 + Ра + Ръ (9.57) Если P1-2 + Ра + Ръ <0, то Т2=0, T3 = CKSo Т4=P2-3 + P3-4+ Ръ (9.58) Схема транспортера, представленная на рис. 9.8, г, отличается от предыдущей наличием шин не только выпуклого А и В, но и вогнутого профиля С и D. Сопротивление движению по вогнутой шине будет отрицательным и поэтому при расчете не учитывается. Расчет в этом случае ведется по спрямленному профилю 1—А—2 и 3—В—4, как и при выпуклом профиле. Если нижняя ветвь транспортера провисает (рис. 9.8, д) в связи с отсутствием на участке 1—2 неподвижной опоры, то на участке 1—2 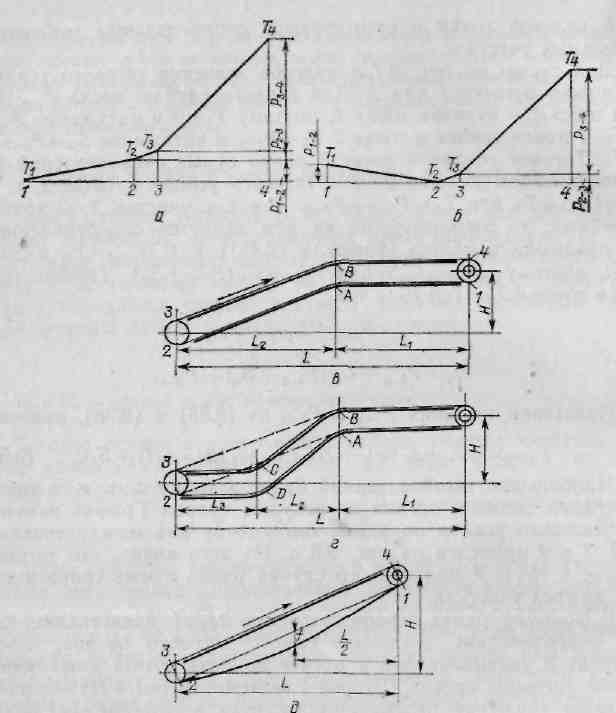 Рис. 9.8. Расчетные схемы для определения тягового усилия |