динамика. Контрольная работа по дисциплине Динамика электроподвижного состава
 Скачать 410.14 Kb. Скачать 410.14 Kb.
|

Рисунок 2.6 – Расчётная схема для положения наибольшего перекоса тележки в круговой кривой при Xmax>2aтПодставляем численные значения в (2.14), (2.15), (2.16), (2.20), (2.22), (2.23), (2.24), (2.25) и полученные значения сводим в таблицу 2.2. Таблица 2.2 – Рассчетные численные значения
Полученные численные значения сводим в динамически паспорт тележки таблица 2.6. Для скоростей V > Vo ,то есть при отсутствие набегания , произведем расчет применяя рассмотренную ранее расчетную схему рисунок 2.6 и методику расчета, начиная с построения зависимости Ст = f (X). Расчёт значений для кривой c возвышения наружного рельса, представлен в динамическом паспорте тележки таблица 2.6. 2.5 Расчёт свободного положения тележки в кривой Диапазон скоростей от V2кр до V1кр разбиваем на 5 интервалов. Расчётная схема для данного положения представлена на рисунке 2.7. Так как в свободном положении для любой скорости отсутствует набегание гребней задней колёсной пары на головки рельсов, то Y2=0.  Рисунок 2.7 - Расчётная схема для свободного положения тележки в круговой кривой Зависимость Cт=f(X) рассчитывается по формуле (2.26)  , (2.26) , (2.26)Для X=1.45 м cos  = = = 0,876 , = 0,876 , cos  = = = 0,876 = 0,876Сm =  = 119,921 кН = 119,921 кНРасчёт для остальных значений X сведём в таблицу 2.3. Таблица 2.3 – Зависимость величины центробежной силы тележки от величины полюсного расстояния Cт =f(X)
На рисунке 2.8 представлен график Cт=f(X). 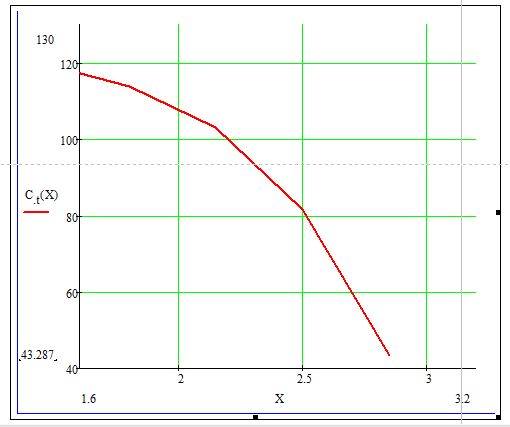 Рисунок 2.8 – График Cт=f(X) По формуле (2.20) для h=0 и V=86.4 км/ч Сm =  = 49.321кН = 49.321кНПо графику Cт=f(X) X=2,9 м Величина реакции наружного рельса определяется по формуле (2.27)  , (2.27) , (2.27) cos = = 0,96155 , = 0,96155 , cos = = 0,12281 = 0,12281Y1 = 49.596 + 2  26,25 (0,96155 + 0,12281) = 93.63 кН 26,25 (0,96155 + 0,12281) = 93.63 кНСилы бокового давления определяем по формулам (1.7) и (1.8) , получим Yб1 = 93.63 – 26,25 · 0,96155 = 68.389 кН, Yб2 = 26,25 · 0.12281 = 3,224 кН . Расчёт свободного положения для остальных значений для кривой без возвышения и с возвышением h=0.06 м наружного рельса приведены в динамическом паспорте тележки таблица 2.5 и таблица 2.6 2.6 Расчёт хордового положения тележки в кривой Расчётная схема для расчёта хордового положения представлена на рисунке 2.9. Р  исунок 2.9 - Расчётная схема для хордового положения тележки в круговой кривой Разобьём диапазон скоростей от V1кр на 5 интервалов. В хордовом положении величина полюсного расстояния постоянна и равна Xmin=1,45 м. Центробежная сила действующая на тележку определяется по формуле (2.20), при h=0 и V=136.8 км/ч Сm =  = 123.645 кН = 123.645 кНРеакции рельсов определяются по формулам (2.28), (2.29)  , (2.28) , (2.28) Y1=Ст–Y2. (2.29) Y2 =  = 1.862 кН, = 1.862 кН,Y1 = 123.645 – 1.862 = 121.783 кН. Силы бокового давления и косинусы углов определяются по формулам (2.7), (2.25) и (2.9), получим cos =cos  = 0,87558, = 0,87558, Yб1 = 121.783 – 26,25 · 0,87558 = 98.799 кН , Yб2 = 1.862 + 26,25 · 0,87558 = 24.846 кН . Расчёт остальных значений для кривой без возвышения и с возвышением h=0.06 м , представлен в динамическом паспорте тележки таблица 2.5 и таблица 2.6 Динамический паспорт представленный в таблице 1.5 и 1.6 составлен на основании расчётов пунктов 2.1-2.6. Таблица 1.5 – Динамический паспорт тележки для кривой радиуса R=500 м при возвышении наружного рельса h=0
Таблица 2.6 – Динамический паспорт тележки для кривой радиуса R=500 м при возвышении наружного рельса h=0,06 м
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||