динамика. Контрольная работа по дисциплине Динамика электроподвижного состава
 Скачать 410.14 Kb. Скачать 410.14 Kb.
|

|

 , (1.18)
, (1.18) . (1.19)
. (1.19) = 0,964 ,
= 0,964 , = 0,
= 0, = 36,67 кН
= 36,67 кН | X, м | 2,9 | 3.09 | 3.28 | 3.47 | 3.66 | 3.867 |
| cos1 | 0,964 | 0,968 | 0,972 | 0,974 | 0,977 | 0.979 |
| cos2 | 0 | 0,231 | 0,429 | 0,58 | 0,689 | 0.765 |
| Ст,кН | 36,67 | 11.18 | -12.02 | -30.83 | -45.13 | -55.77 |
На рисунке 2.5 представлен график Cт=f(X).
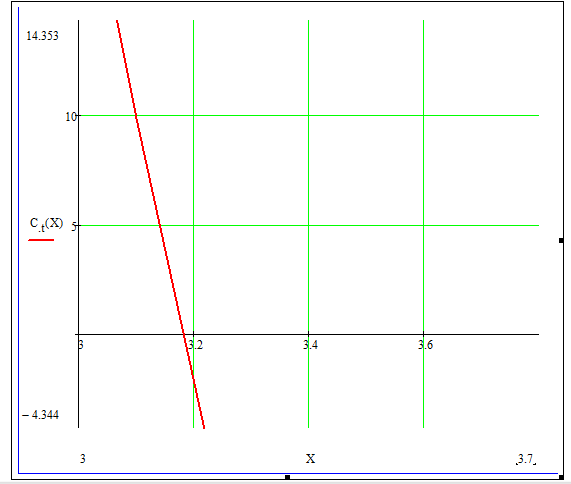
Рисунок 2.5 – Зависимость Cт=f(X).
Значение центробежной силы для каждого значения скорости определяется по формуле (2.20)

 , (2.20)
, (2.20)Для скорости h = 0 и V = 0 км/ч.
Сm =
 = 0 кН.
= 0 кН.Для рассчитанного Cт по графику Ст = f(X) определяем X = 3,179 м.
Величина Y1 определяется по формуле (2.21)
 (2.21)
(2.21)где
cos
 =
= = 0,969764 ,
= 0,969764 , cos
 =
= = 0,3293
= 0,3293Y1 = 0 + 2
 26,25 (0,969764 + 0,3293) = 68,201 кН.
26,25 (0,969764 + 0,3293) = 68,201 кН. Силы бокового давления по формулам (1.7) и (1.8):
Yб1=68,201 – 26,25 0,969764 = 42,745 кН ,
Yб2=26,25∙0,3293 = 8,644 кН .
Расчёт для остальных значений скоростей для кривой без возвышения наружного рельса, представлен в динамическом паспорте тележки таблица 1.5.
Подкоренное выражение полученное по формуле (2.13) при h=0,06 м положительное, то при скоростях , меньших Vo , наблюдается набегание гребня колеса задней колесной пары тележки на рабочую грань головки внутреннего рельса кривой , а при скоростях , равных или больших Vo ,отсутствие набегания.
Произведем расчет для скоростей V < Vo , то есть при наличии набегания, применяется расчетная схема рисунок 2.6 . В этом случае полюсное расстояние для всего диапазона скоростей постоянно и равно Xmax , а для скорости Vo , значение Y2=0.
Разбиваем диапазон скоростей от V=0 до V=Vo на 3 интервала , вычисляем значения центробежной силы тележки по формуле (2.20). После этого для каждой скорости по формулам (2.22), (2.23), (2.24), (2.25)
 , (2.22)
, (2.22) , (2.23)
, (2.23)Yб1=Y1 - Тcos1, (2.24)
Yб2=Y2+Tcos2 , (2.25)
где А , cos1, cos2 - определяется по формулам (2.14), (2.15), (2.16) .