Лабораторная работа 110 введение
 Скачать 2.69 Mb. Скачать 2.69 Mb.
|

108.ЛАБОРАТОРНАЯ РАБОТА 110 Колебаниями называются процессы, в той или иной степени повторяющиеся во времени. При периодических колебаниях изменение наблюдаемой величины в точности повторяется через совершенно определенное время - период. Они описываются периодической функцией времени где Т – период функции, n – произвольное целое число. Колебание будет полным, если за кратчайшее время система полностью повторит свое движение. Время Т, в течение которого совершается одно полное колебание, является периодом колебания. Число полных колебаний в единицу времени называется частотой колебаний. С 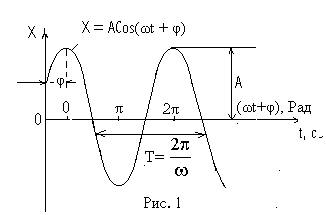 истема, выведенная из положения равновесия и предоставленная самой себе, совершает свободные ( или собственные ) колебания. Если при этом энергия системы не изменяется, то ее колебания будут собственными незатухающими. Колебания с уменьшающейся энергией называются свободными затухающими. Колебания, совершаемые системой под воздействием внешней периодически изменяющейся силы, называются вынужденными. Среди разнообразных колебаний, встречающихся в природе, основную и очень важную роль играют гармонические колебания (рис.1) представляют периодический процесс, в котором изменение наблюдаемой величины описывается функцией синуса ( или косинуса ): Здесь Х – отклонение ( смещение ) механической системы от положения равновесия. Наибольшее смещение А называется амплитудой колебаний. Аргумент синуса или косинуса (ωt + φ) определяет смещение в любой момент времени и называется фазой колебаний; φ – начальная фаза ( в момент t = 0). Величина ω, равная числу колебаний за 2π единиц времени, называется циклической ( или круговой) частотой. Она в 2π раз больше обычной частоты ν: Амплитуда А и начальная фаза φ определяются начальными условиями, т.е. смещением Х0 и скоростью V0 в момент времени t = 0. Система, совершающая гармонические колебания, называется гармоническим осциллятором. Для описания его колебаний составляют дифференциальное уравнение движения и, решая его, находят закон этих колебаний – зависимость смещения от времени. Рассмотрим несколько простейших систем, совершающих гармонические колебания.
При смещении тела на расстояние Х от положения равновесия на него действует сила упругости пружины, направленная к положению равновесия: F 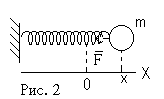 = - kX (5) = - kX (5)где k – коэффициент упругости (жесткость) пружины. Уравнение второго закона Ньютона для тела имеет вид mX = - kX или где Обозначив положительную величину k/m через ω20, получим Следовательно, движение тела под действием упругой силы описывается линейным однородным дифференциальным уравнением второго порядка с постоянными коэффициентами без первой производной. Уравнение вида (7) называется уравнением гармонических колебаний. Общее решение уравнения (7) X = A Cos(ω0t + φ) (8) является законом гармонического колебательного движения с собственной частотой и периодом колебаний Т  аким образом, для того чтобы тело совершало гармонические колебания, действующая на него сила должна быть пропорциональна величине смещения тела и направлена в сторону, противоположную этому смещению. Если сила не является по своей природе упругой, но подчиняется закону (5), то ее называют “квазиупругой силой” (как бы упругой).
При отклонении маятника от положения равновесия на угол φ возникает вращательный момент М, стремящийся вернуть его в положение равновесия: М = - mga Sinφ, где m – масса маятника, g – ускорение свободного падения, а – расстояние между точкой подвеса 0 и центром тяжести С. Основной закон динамики вращательного движения в применении к физическому маятнику запишется в виде: J где J – момент инерции физического маятника относительно оси вращения 0, При малых угловых отклонениях Sin φ ≈ φ (в радианах) формула (11) переходит в уже известное нам уравнение гармонического колебания В данном случае круговая частота колебаний физического маятника выражается формулой а период колебаний 3. Математический маятник – материальная точка, подвешенная на идеально гибкой, невесомой, нерастяжимой нити и способная совершать колебания в вертикальной плоскости под действием силы тяжести. Математический маятник представляет собой предельный случай физического маятника, вся масса которого сосредоточена в его центре масс, так что а = l – длина математического маятника, а J = ml2. Соответственно, круговая частота и период колебаний математического маятника равны Малые колебания рассмотренных маятников являются примерами изохронных колебаний, т.е. колебаний, частоты и периоды которых не зависят от амплитуды. В общем случае период колебаний зависит от амплитуды, например, решив уравнение (2) для физического маятника, можно найти: где Из уравнений (14) и (15) следует, что математический маятник с длиной будет иметь такой период колебаний, как и данный физический маятник. Величину (17) называют приведенной длиной физического маятника. Точка По теореме Штейнера момент инерции маятника J может быть представлен в виде где J0 – момент инерции относительно оси, параллельной оси вращения и проходящей через центр масс маятника. Подставив (18) в формулу (17), получим:  , (19) , (19)Следовательно, точка подвеса 0 и центр качания Из рис.3 следует: и, следовательно, На этом свойстве основано определение ускорения свободного падения с помощью так называемого оборотного маятника, в котором путем перераспределения масс можно добиться взаимности между двумя асимметричными точками подвеса относительно центра масс. Тогда при подвешивании за любую из этих двух точек подвеса период колебаний будет одинаков, а расстояние между точками будет равно L Измерив период колебаний маятника и зная L, можно по формуле найти ускорение свободного падения g. ЗАТУХАЮЩИЕ КОЛЕБАНИЯ В реальных колебательных системах кроме квазиупругих сил присутствуют силы сопротивления среды. Наличие сил трения приводит к рассеянию (диссипации) энергии и уменьшению амплитуды колебаний. Замедляя движение, силы трения увеличивают период, т.е. уменьшает частоту колебаний. Такие колебания не будут гармоническими. Колебания с непрерывно уменьшающейся во времени амплитудой вследствие рассеяния энергии называются затухающими. При достаточно малых скоростях сила трения пропорциональна скорости тела и направлена против движения где r – коэффициент трения, зависящий от свойств среды, формы и размеров движущегося тела. Дифференциальное уравнение затухающих колебаний при наличии сил трения будет иметь вид где Общим решением уравнения (21) в случае малых затуханий ( Оно отличается от чисто гармонического (8) тем, что амплитуда колебаний является убывающей функцией времени, а круговая частота Период затухающих колебаний равен Зависимость смещения Х от t затухающих колебаний представлена на рис.4. C 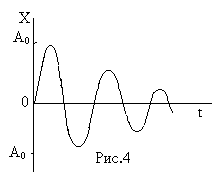 тепень убывания амплитуды определяется коэффициентом затухания Скорость уменьшения амплитуды колебаний характеризуется логарифмическим декрементом затухания  (27) (27)называется декрементом затухания, который показывает, во сколько раз уменьшается амплитуда колебаний за время, равное периоду. Натуральный логарифм этого отношения называется логарифмическим декрементом затухания. Здесь, Ne – число колебаний, совершаемых за время уменьшения амплитуды в е раз, т.е. за время релаксации. Таким образом, логарифмический декремент затухания есть величина, обратная числу колебаний, по прошествии которых амплитуда колебаний уменьшается в е раз. Скорость уменьшения энергии колебательной системы характеризуется добротностью Q. Добротностью колебательной системы называется величина, пропорциональная отношению полной энергии Е(t) колебательной системы к энергии (-  (29) (29)Полная энергия колебательной системы в произвольный момент времени и при любом значении Х имеет вид  (30) (30) Так как энергия пропорциональна квадрату амплитуды, энергия затухающих колебаний уменьшается пропорционально величине Тогда, согласно определению, выражение для добротности колебательной системы будет иметь вид  . (32) . (32)Здесь учтено, что при малых затуханиях (1): 1-е-2 2. Следовательно, добротность пропорциональна числу колебаний Ne, совершаемых системой за время релаксации. Добротность колебательных систем может сильно различаться, например, добротность физического маятника Q |

 (38)
(38)
 (41)
(41)