моделирование. Математическое моделирование при активном эксперименте
 Скачать 446.5 Kb. Скачать 446.5 Kb.
|

|
где:  В силу наличия неуправляемых и даже неконтролируемых входных переменных Xi изменение величины Y носит случайный характер, а потому уравнение (1) не дает нам точной связи между входом и выходом объекта и является лишь условным математическим ожиданием случайной величины Y, т.е. уравнением регрессии. Чтобы отыскать коэффициенты уравнения регрессии по результатам экспериментов в N точках факторного пространства (что является типичной задачей регрессионного анализа), необходимо выполнение следующих предпосылок: Результаты наблюдений Y1, Y2,...,Yn выходной величины в N точках факторного пространства представляют собой независимые, нормально распределенные случайные величины. Выборочные дисперсии опытов Независимые переменные X1, X2,...,Xn измеряются с ошибкой много меньшей, чем величина возможного отклонения выходного параметра Y под влиянием неучтенных факторов. Тогда задача отыскания коэффициентов уравнения регрессии сводится к решению системы так называемых нормальных уравнений:
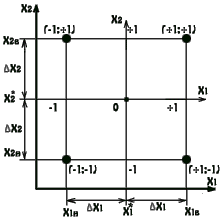
где Yg- экспериментальные значения выходного параметра, полученные в g-й точке факторного пространства; d - количество членов в уравнении регрессии. Выражение (2) является основным критерием проверки правильности найденного уравнения регрессии. Чтобы система нормальных уравнений, которая может быть представлена в виде матрицы, имела единственное решение, необходимо, чтобы матрица была невырожденной, т.е. чтобы вектор – столбцы были линейно – независимы. Чтобы величины коэффициентов уравнения регрессии не зависели от числа членов матрицы, нужно на нее наложить дополнительное условие ортогональности вектор столбцов. 1. Полный факторный эксперимент Полным факторным экспериментом (ПФЭ) называется эксперимент, реализующий все возможные повторяющиеся комбинации уровней независимых переменных, каждая из которых принудительно варьируется на двух уровнях (Рис 1)
Число этих комбинаций N=2n определяет тип планирования. Для гарантированного получения единственного решения системы нормальных уравнений необходимо иметь ортогональную матрицу планирования, что невозможно обеспечить в абсолютной системе единиц факторов Xi, то есть тогда, когда факторы именованные (например, трудно представить 17 километров ортогональными к 12 килограммам). Поэтому необходимо провести предварительное преобразование каждого фактора - его перевод в систему относительных координат. Такое преобразование легко сделать с помощью переноса начала координат в базовую точку X* и выбора единицы отсчета Xi по каждой координате Xi.
Это дает возможность легко построить ортогональную матрицу планирования и значительно облегчает дальнейшие расчеты, так как в этом случае верхние и нижние уровни варьирования Xiв и Xiн в относительных единицах будут равны соответственно xiв = +1 и xiн = -1. Шаг варьирования по каждой переменной выбирается таким, чтобы приращение величины выходного параметра Y к базовому значению Y* при реализации шага можно было выделить на фоне "шума" при небольшом числе параллельных опытов. Если нет никаких указаний на величину шага Xi, то в первом приближении можно выбрать Xi= 0,15X*i, т.е. принять за шаг 15%-ное отклонение от базового уровня X*i. Такой шаг дает достаточную гарантию того, что фактор Xi вызовет заметную реакцию Y, если связь между ними существует. Матрица планирования должна отвечать следующим условиям: Ортогональность  Условие нормированости  Симметричность относительно центра экстремума  Ротатабельность, т.е. координаты точек факторного пространства в матрице планирования подстраиваются так, что точность предсказания значения параметра оптимизации одинакова на равных расстояниях от центра эксперимента (базовой точки) и не зависит от направления. Матрица планирования составляется по следующим правилам: Каждая g-я строка матрицы представляет собой набор координат точки Поскольку переменные xgi принимают лишь значения +1 и -1, то все остальные переменные могут принимать те же значения, что позволяет в целях упрощения записывать в таблицу вместо +1 и -1 их знаки + и -; Первая строка
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||