Метода_(лабы_1-11). Механика и термодинамика
 Скачать 0.64 Mb. Скачать 0.64 Mb.
|

|
Работа № 5. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ В МАШИНЕ АТВУДА Цель работы:изучение вращательного и поступательного движений намашине Атвуда, определение момента инерции блока и момента сил трения в оси блока. Приборы и принадлежности.Машина Атвуда,набор грузов,секундо-мер, масштабная линейка. Машина Атвуда является настольным прибором, ее изображение при-ведено на рис. 5.1. На вертикальной стойке 1 основания 2 расположены три кронштейна: нижний 3, средний 4 и верхний 5. На верхнем кронштейне 5 крепится блок с узлом подшипников качения, через который переброшена нить с грузом 6. На верхнем кронштейне находится электромагнит 7, кото-рый при подаче на него напряжения с помощью фрикциона удерживает сис-
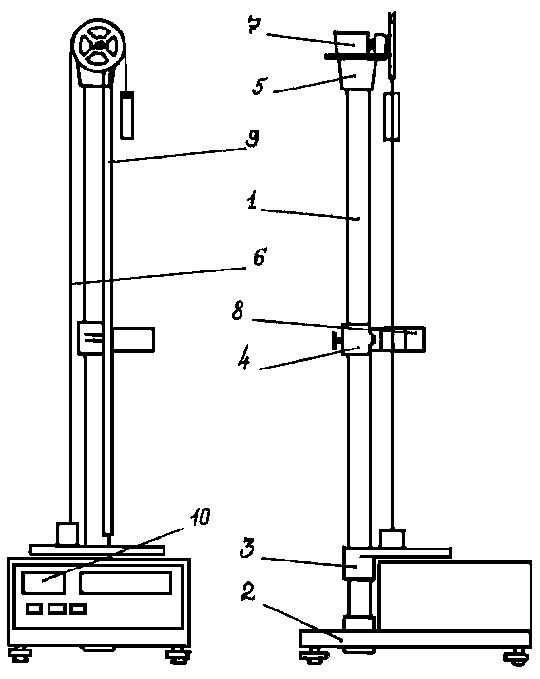 Начальное положение определяют визуально по нижнему краю торца груза, конечное положение – по риске среднего кронштейна. Секундомер 10 выполнен как самостоятельный прибор с цифровой индикацией времени. Исследуемые закономерности Машина Атвуда предназначена для изучения законов поступательного вращательного движений. Принцип работы установки основан на том, что, 30 когда на концах нити подвешены грузы различной массы, система начинает двигаться равноускоренно. В комплект грузов входит несколько перегрузов, что позволяет исследовать движения с различными ускорениями. На каждый груз действуют две силы – сила тяжести и сила реакции ни-ти, под действием которых грузы движутся. Полагая, что нить невесома и не-растяжима, получим, что ускорения обоих грузов будут постоянны, одинако-вы по величине и противоположны по направлению. На основании второго закона Ньютона для первого груза с перегрузом и второго груза можно записать
где m1 и m2 – массы 1-го и 2-го грузов; mi – масса перегруза, находящегося на 1-м грузе; T1 и T2 – силы, равные силам натяжения нитей, действующие на 1-й и 2-й грузы и на блок; a – ускорение грузов. Вращение блока описывается уравнением
где r – радиус блока; Mтр – момент сил трения в оси блока; I – момент инер-ции блока; a
где S – путь, пройденный грузом за время t. Из выражения (4) видно зависи-мость момента силы от углового ускорения является линейной (Y=aX+b). Целью работы является определение момента инерции блока I и мо-мента сил трения в блоке M тр . Для этого экспериментально исследуется за-висимость (4) M от . Различные значения M реализуются с помощью набора 31 перегрузов массой mi и определяются по формуле (5). Значения рассчиты-ваются по формуле (7). Величины I и M тр определяются по формулам ли-нейной регрессии (методом наименьших квадратов). Указания по подготовке к работе Занесите в протокол Таблицу 5.1 для записи результатов наблюдений и Таблицу 5.2 для записи параметров установки и однократно измеряемых в опыте величин. Таблица 5.1 m1 m2 m3 m4 m1 + m3 m2 + m3 m3 + m4    t1,с t2,с t3,с Таблица 5.2 r,см h0,см h1,см m1,г m2,г m1, г m2 , г m3, г m4 , г  Изучите и сформулируйте алгоритм нахождения коэффициентов a и b в линейной зависимости Y = aX + b по методу наименьших квадратов (см. [2], а также Приложение к пособию). Указания по проведению наблюдений Перекиньте через блок нить с двумя грузами. Запишите радиус блока r, указанный на панели прибора, в Таблицу 5.2. Отрегулируйте положение основания установки при помощи регулиро-вочных опор, используя для визуального наблюдения нить с грузами в ка-честве отвесов, чтобы она была параллельна стойке 1. Установите кронштейн с фотодатчиком в нижней части шкалы таким об- разом, чтобы правый груз при движении проходил посередине оптической оси фотодатчика. По риске на среднем кронштейне определите h0 – поло-жение оптической оси фотодатчика на измерительной шкале вертикаль-ной стойки и занесите его в Таблицу 5.2 протокола. Нажмите кнопку «СЕТЬ» на лицевой панели секундомера, при этом должны загореться лампочки с цифровой индикацией. 32 Нажмите на кнопку «СБРОС» секундомера и убедитесь, что на цифровых индикаторах загорелись нули. Переместите правый груз в верхнее положение, положите на него пере-груз № 1. Запишите в Таблицу 5.2 протокола значение шкалы h1 , соответствующее нижнему краю груза в его верхнем положении. Пройденный путь опреде-ляется как разность: s h0 –h1. Поместив ладонь руки под кронштейном с фотодатчиком, нажмите кноп-ку «ПУСК». При нажатии кнопки отключается фрикцион магнита, удер-живающего грузы в неподвижном состоянии, а секундомер начинает счет времени. При пересечении грузом оптической оси фотодатчика счет вре-мени прекратится, после чего отпустите кнопку «ПУСК». Запишите время t равноускоренного движения грузов в Таблицу5.1. Проведите измерения по пп. 7 и 8 три раза. Проведите измерения по пп. 7–9 для следующих перегрузов и их комби-наций: а) № 2; б) № 3; в) № 3 + № 1; г) № 3 + № 2; д) № 3 + № 4. Значения масс перегрузов выгравированы на их поверхности и должны быть зане-сены в Таблицу 5.2. Задание по обработке результатов эксперимента Определите момент инерции блока I I I и момент сил трения в блоке M тр M тр M трметодом наименьших квадратов (МНК). Из сопостав-   ления линейной зависимости Y = aX + b и уравнения (4) получим: X = ; Y M; a = I;bMтр. Для расчетов используются N =6 пар значений па- раметров X i и Yi. Результат запишите в виде: M Iε M тр, где I I ,MтрMтр Mтрпри P 95%. По найденным методом наименьших квадратов параметрам линейной за-висимости (4), постройте график зависимости M от . Для этого на осях Y = M и X = ε в соответствии с Таблицей 5.2 выберите масштаб (он выбира- ется так, чтобы график шел примерно под углом 450 к оси X) и нанесите в выбранном масштабе на координатную плоскость экспериментальные 33 точки X i , Yi (i , Mi ) (i=1…6). Аппроксимирующая эти точки теорети-ческая прямая должна проходить через точки ( X , Y ) и (0, b) .   Контрольные вопросы Дайте определение момента инерции точечного, составного и сплошного тел. Объясните его физический смысл. Сделайте рисунок машины Атвуда и укажите на нем все силы, действую-щие на грузы и блок. Дайте определение момента силы. Укажите на рисунке направления мо-ментов сил, действующих на блок. Сформулируйте методику измерений, используемую в лабораторной ра-боте, и опишите лабораторную установку. Используя рисунок, напишите уравнения движения грузов и блока. Используя эту систему уравнений, найдите ускорение движения грузов. Считая все величины, входящие в полученную формулу, известными из опыта, рассчитайте это ускорение для одного из перегрузов и сопоставьте с его экспериментально определенным значением. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||