Метода_(лабы_1-11). Механика и термодинамика
 Скачать 0.64 Mb. Скачать 0.64 Mb.
|

|
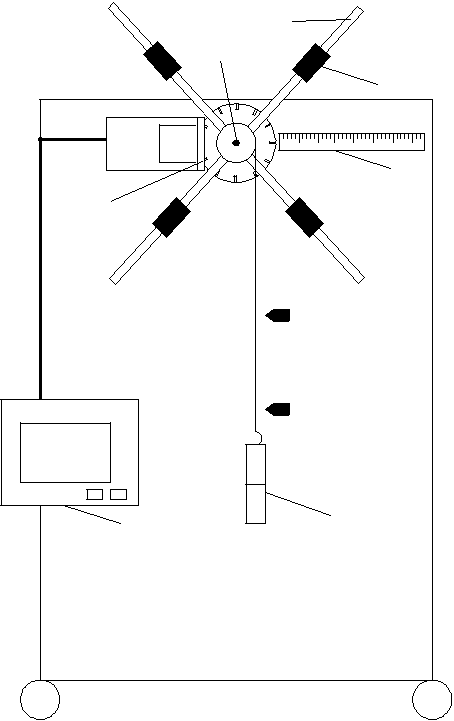
Работа №7. МАЯТНИК ОБЕРБЕКА Цель работы. Экспериментальное исследование законов динамикивращательного движения твердого тела на примере маятника Обербека, оп-ределение постоянной части момента инерции маятника Обербека. Приборы и принадлежности. Маятник Обербека (рис. 7.1) представляет собой крестовину 1 с груза-ми 2, на вращающейся оси 3. На шкив на оси намотана нить с грузиком 5, ко-торая, разматываясь, вызывает вращательное движение крестовины. На че-тырех взаимно перпендикулярных стержнях крестовины располагаются че-тыре подвижных груза 2 массой т каждый, положение которых относитель-но оси вращения маятника определяется по измерительной линейке 6. В опы- те положения грузов на крестовине меняют с помощью их перемещения по 40 резьбовым спицам крестовины. Фиксация грузов в каждой серии измерений осуществ-ляется путем законтривания двух резьбовых половин каждого груза в выбранном поло-жении. На оси крестовины располагается датчик 4 угловой скорости вращения маят-ника, подключенный через концентратор к измерительному блоку 7. Исследуемые закономерности Вращение маятника описывается ос-новным уравнением динамики вращательно-го движения
где М – момент сил, действующих на маятник, I – его момент инерции. Вращательный момент М сил, действующих на маятник, определяется выражением: M TR Mтр, (2) где Т – сила, действующая на шкив маятника со стороны нити, M тр – момент сил трения в оси маятника, R – радиус шкива, на который намотана нить с прикрепленным к ней грузом m0 . Движение груза m0 на нити описывается вторым законом Ньютона
Если подставить (4) в (1), то уравнение вращательного движения маят-ника примет вид Iε m0g a R M тр. 41 С учетом, что угловое ускорение ε вращения маятника связано с ускорением
В этой формуле правая часть равенства есть постоянная величина. От-сюда следует, что вращение маятника для выбранного в опыте положения грузов является равноускоренным. Кроме того, из формулы (6) следует, что увеличение момента инерции I системы должно приводить в данной работе к уменьшению углового ускорения ε ее вращения, и наоборот. Если m – масса одного из грузов на крестовине, r – его расстояние до оси вращения маятника, то момент инерции крестовины с 4-мя грузами в формуле (6) равен
мент инерции одного из подвижных грузов, рассчитанный по теореме Гюй-генса-Штейнера, Im его собственный момент инерции, I C I 0 4Im – посто-янная часть момента инерции маятника Обербека. Момент инерции IC в данной работе является экспериментально опре-деляемой величиной. Для его нахождения запишем (6) для двух различных положений ri и rj грузов m относительно оси вращения маятника:
Отсюда можно найти искомую величину IC : 42
r 2ε r 2ε I C, R , m, m0–константы,поэтому множительbi j j j i i constпри раз-ε i ε j  личной геометрии постановки эксперимента. Для выполнения работы необходимо выполнить три серии измерений угловых ускорений ε1 , ε2 и ε3 маятника при трех различных удаленностях r1, r2и r3грузов на крестовине от оси ее вращения. Угловое ускорение вращения маятника определяется по формуле 2 / t 2 2 h / Rt 2 , где h / R – угол поворота шкива при прохождении грузом на нити расстояния h между двумя метками на установке за время t. Операцию определения времени t и вычисления ε в работе выполняет изме-рительный блок установки. При этом средние значения t и ε по четырем из-мерениям в одном опыте высвечиваются на ЖК дисплее установки. Указания по подготовке к работе Занесите в протокол Таблицу 7.1 для записи параметров установки и Таблицу 7.2 для записи результатов наблюдений.
Указания по проведению наблюдений Запишите в Таблицу 7.1 массы грузов m 53 г на крестовине маятника и на нити шкива m0 119 г , радиус шкива R =16.5 мм, высоту (длину) гру-зов на крестовине l 24 мм , расстояние между метками на установке h = 43 430 мм и удаленности грузов на крестовине от ее оси вращения r212см, r316см. Приборные погрешности масс 2 г , θ R r18см, 0.5 мм, θ l θ h θ r 1 мм . Соберите лабораторную установку, зафиксировав подвижные грузы на вы-бранном расстоянии r1 от оси вращения маятника. ВНИМАНИЕ! При ус- тановке грузов на крестовине отметка на линейке, соответствующая их выбранному положению, должна быть видна сквозь зазор между грузами, т.е. совпадать с положением их общего центра масс. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||