Теория оптимизаций. ТЕОРИЯ ОПТИМИЗАЦИИ общий конспект лекций. Общие сведения о теории оптимизации
 Скачать 2.93 Mb. Скачать 2.93 Mb.
|

|
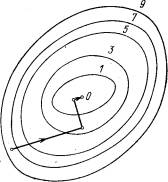
26) Геометрическая интерпретация градиентных методов Запись градиента и процедуры поиска экстремума градиентным методом в матричной форме 27) Градиент функции n переменных с пояснениями в аналитической форме 28) Метод градиентного спуска, схема алгоритма 29) Метод градиентного спуска с постоянным шагом Лекция 8. Модификации градиентных методов 8.1 Классификация методов Модифицированные градиентные методы представляют собой усовершенствованные простейшие методы, дополненные процедурами, обеспечивающими упрощение вычислительных процедур и сокращение количества шагов итерационного процесса, требуемых для поиска экстремума. Градиентные методы можно классифицировать по различным признакам. По количеству n варьируемых переменных в функции, для которой осуществляется поиск экстремума, среди градиентных методов выделяют: одномерные (n=1), многомерные (n>1). По присутствию ограничений градиентные методы делят на: без ограничений (безусловная оптимизация), с ограничениями (условная оптимизация). По типу информации, используемой при поиске экстремума, методы делят на: градиентные методы первого порядка, в которых при поиске экстремума функции используются значения её первых производных; градиентные методы второго порядка, в которых при поиске экстремума функции наряду с первыми производными используются и вторые производные. Ни один градиентный метод не является универсальным. Все они различаются спецификой используемых математических процедур, и в каждом конкретном случае необходимо выбирать метод, соответствующий конкретным особенностям решаемой задачи. 8.2 Градиентные методы первого порядка 8.2.2 Метод наискорейшего спуска Метод наискорейшего спуска относят к классу градиентных, хотя при нём градиент определяют только в начальной точке, а затем только при необходимости.
Если на каком-то шаге значение Схема алгоритма метода наискорейшего спуска представлена на рис. 4. 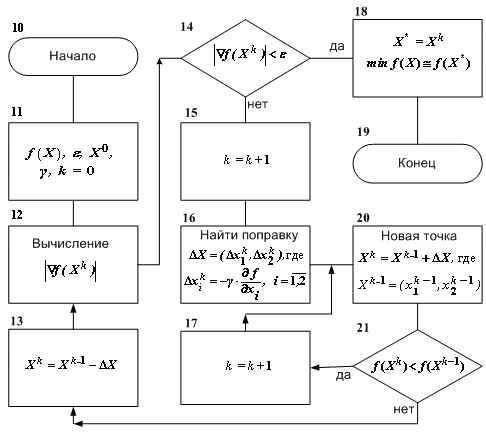 Рис. 4. Алгоритм метода наискорейшего градиентного спуска Преимущество метода наискорейшего спуска состоит в его простоте, так как в большинстве шагов вычисляются только значения функции Для закрепления изложенных теоретических положений рассмотрим задачу в следующей математической постановке: «Найти минимум функции f( при заданных исходных данных о координатах начальной точки поиска Фрагмент решения задачи c использованием алгоритма метода наискорейшего градиентного спуска: 1) Исходные данные (блочный символ 11) k=0; 2) Вычисление длины вектора-градиента (блочный символ 12) =  = 18,601. = 18,601. 3) Проверка достижения заданной точности вычислений (блочный символ 14) 4) Очередной шаг выполнения итерационной процедуры (блочный символ 15) k=k +1=1 5) Нахождение поправки (блочный символ 16) 6) Нахождение координат новой точки (блочный символ 20) Так как 7) Проверка (блочный символ 21) сохранения условия приближения к минимуму: следовательно условие Перейти к предписанию блочного символа 17. и т. д. 8.2.2 Метод градиентного спуска с дроблением шага Схема алгоритма метода градиентного спуска с дроблением шага для частного случая функции двух переменных представлена на рис. 5.
Рис.5. Алгоритм метода градиентного спуска с дроблением шага При данном методе сначала определяются (см. блочный символ 25) производные В каждом шаге итерационной процедуры: вычисляется значение  ; ;реализуется (блочный символ 31) итерационное соотношение с использованием поправки  ; ;определяется (блочный символ 32) значение функции проверяется (блочный символ 29) сохранение условия монотонности (приближения к минимуму): Если условие монотонности соблюдается, делается, как и в методе градиентного спуска, следующий шаг поиска экстремума (см. переход от блочного символа 29 к блочному символу 24) с вычислением (блочный символ 25) значений производных, определением (блочный символ 26) нового значения градиента и проверкой условия завершения поиска. При невыполнении такого условия определяются (блочный символ 30) поправка и (блочный символ 31) координаты новой точки в соответствии с итерационным соотношением. Если же условие монотонности нарушается, значение шага дробится путём деления на 2 (переход от блочного символа 28 к блочному символу 32), пока монотонность не восстановится, и только после этого осуществляется переход к последующим итерациям. Вычисления прекращают при выполнении условия │ 8.3 Градиентные методы второго порядка 8.3.1 Метод Ньютона Этот метод, как и ряд других методов второго порядка, применим лишь тогда, когда рассматриваемая функция является дважды дифференцируемой и строго выпуклой – только тогда обеспечивается сходимость метода (именно при таких условиях разложение целевой функции в ряд Тейлора в окрестности точки минимума Поэтому при методе Ньютона в векторе поправок возвращаются от матрицы Г к матрице, обратной матрице A, элементами которой служат частные производные второго порядка заданной функции, вычисленные в произвольной точке  С учётом сказанного, вектор поправок при методе Ньютона имеет вид Если разложение в ряд Тейлора с удержанием только линейных членов достаточно точно представляет рассматриваемую функцию, то точка минимума Практически достичь требуемого результата за один шаг в большинстве случаев оказывается невозможным, и поэтому выполняют некоторую последовательность итераций с заданным шагом где  Вычисления проводят до тех пор, пока не выполнится условие сходимости: │ где 8.3.2 О других методах второго порядка Метод Ньютона с учётом специфики некоторых частных случаев оптимизации и выявленных дополнительных возможностей получил своё развитие в виде ряда модификаций. К числу таких модификаций относятся так называемые квазиньютоновские методы, например, такие как метод Ньютона-Рафсона, метод сопряженных градиентов (Флетчера-Ривса), метод Давидона-Флетчера-Пауэлла (ДФП-метод) и ряд других. Ввиду весьма ограниченного времени, отводимого на изучение преподаваемой дисциплины, квазиньютоновские методы для желающих и заинтересованных могут послужить объектом самостоятельного изучения. 8.3.3 Учёт ограничений и многоэкстремальные задачи При нахождении градиентными методами экстремума рассматриваемой функции Система ограничений по существу определяет некоторую допустимую зону значений переменных и некоторую запретную зону, которая не подчиняется системе ограничений. Поэтому при движении в направлении градиента (или антиградиента) можно встретиться с запретной зоной. В такой ситуации продолжают поиск не в направлении градиента, а вдоль границы запретной зоны, осуществляя на ней поиск экстремума. При применении градиентных методов возникают сложности и в случаях многоэкстремальных задач, поскольку все рассмотренные методы относятся к классу методов локального поиска. Так как в таких случаях всё зависит от удачности выбора начальной точки Таким образом, можно найти несколько точек локального экстремума и выбрать из них наилучшую. Краткое заключение по дисциплине Следует учесть, что рассматриваемые в рамках изучаемой дисциплины «Теория оптимизации» методы нахождения экстремумов функций нескольких переменных, вариационные методы и методы градиентного поиска представляют собой лишь часть общенаучного арсенала методов оптимизации. Не изученные методы частично будут охвачены дисциплиной «Основы оптимизации управления», запланированной для изучения в следующем семестре и в какой-то части будут предметом самостоятельного изучения при выполнении курсовых работ по обеим названным дисциплинам. По материалам данной лекции предусмотрена 4-х часовая лабораторная работа. ЛИТЕРАТУРА 1. Аттетков А.В., Галкин С.В., В.С. Зарубин. Методы оптимизации: Учеб. для вузов / Под ред. В.С. Зарубина, А.П. Крищенко. М.: Изд-во МГТУ им. Н.Э. Баумана, 2001. 12. ГОСТ 19.002-80. Схемы алгоритмов и программ, правила выполнения. ВОПРОСЫ ДЛЯ САМОКОТРОЛЯ 30) Классификация градиентных методов 31) Метод наискорейшего спуска 32) Метода градиентного спуска с дроблением шага, схема алгоритма 33) Метод Ньютона 34) Учёт ограничений при поиске экстремума градиентными методами и многоэкстремальные задачи |