Глава 1_ANSYS. Основы работы в программе ansys 1 Основные элементы управления в ansys
 Скачать 2.03 Mb. Скачать 2.03 Mb.
|

|
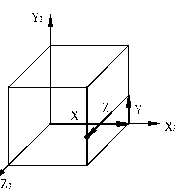
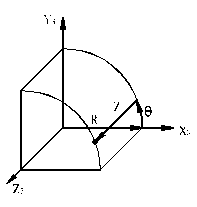
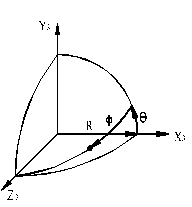
Выбор типа расчета.При выборе типа решаемой задачи несколько упрощается вид главного меню, то есть устанавливается своего рода фильтр, благодаря которому остаются доступными только те пункты меню, которые непосредственно связаны с выбранным типом расчета. Осуществляется выбор с помощью пункта главного меню: Main Menu > Preferences… В появившемся диалоговом окне нужно установить флажок напротив типа решаемой задачи и подтвердить выбор с помощью кнопки OK. Формирование исходных данных.Для этого используется пункт главного меню: Utility Menu >Parameters > Scalar Parameters… В поле Selectionвводятся параметры, которые будут использоваться в расчете. После ввода каждой константы нажимаем Accept. Использовать этот пункт меню удобно тогда, когда одну и ту же задачу нужно решать несколько раз, но при разных параметрах (рис.1.11). 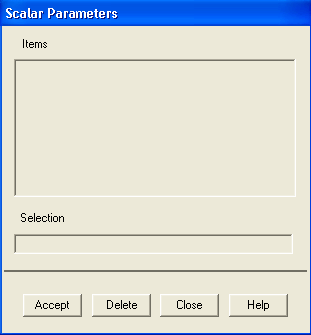 Рис.1.11 Выбор координатной системы.В программе ANSYS существуют следующие типы координатных систем: Глобальные и локальные системы координат, используемые для определения местонахождения геометрических объектов (узлов, ключевых точек и т.д.) в пространстве; Система координат отображения информации, определяющая систему, в которой геометрические объекты отображаются в табличном или графическом виде; Узловая система координат, определяющая направление степеней свободы для каждого узла и ориентацию составляющих вектора результатов в узлах; Система координат элемента, определяющая ориентацию характеристик материала, зависящих от направления, и компонентов вектора результатов для элемента; Система координат результатов, используемая для преобразования результатов в узлах или элементах в отдельную систему координат для распечатки листинга, графического вывода на экран или основных операций в постпроцессоре общего назначения (POST1). Рассмотрим более подробно каждую из координатных систем. Глобальная система координат – это всеобщая или абсолютная система. В программе ANSYS предусмотрено использование трех предопределенных глобальных систем: декартовой, цилиндрической и сферической. Все три системы правосторонние, имеют одно и то же начало и идентифицируются следующим образом: 0 – декартова, 1 – цилиндрическая и 2 – сферическая (рис.1.12).
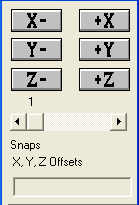
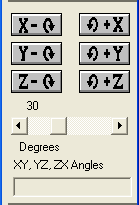
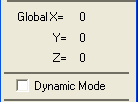
Рис.1.12 Локальная система координат. Во многих случаях у пользователя возникает необходимость установить собственную систему координат, начало которой не совпадает с началом глобальной системы координат или ориентация которой отличается от ориентации предопределенной глобальной системы. Локальная система координат может быть декартовой, цилиндрической или сферической. Следует заметить, что локальную, цилиндрическую или сферическую системы координат можно задать в круговой или эллиптической конфигурации. Кроме того, может быть задана тороидальная локальная система координат. Когда локальная система координат определена, она становится активной. При создании локальной системы ей нужно присвоить идентифицирующий номер, который должен быть больше 10. Локальные системы координат могут быть созданы следующими способами: Задание локальной системы с использованием глобальной декартовой системы координат: Utility Menu > WorkPlane > Local Coordinate Systems > Create Local CS > AT Specified Loc В окне Create CS at Locationнужно ввести координаты начала локальной системы координат, разделяя их запятой и нажать ОК. В диалоговом окне Create Local CS at Specified Locationнужно указать следующие параметры. В поле KCN Ref number of new coord sysвводим номер системы координат, который должен быть больше 10. Если уже есть система координат с таким номером, то она будет переопределена. В полеKCS Type of coordinate systemнеобходимо выбрать тип системы координат (Cartesian 0 – декартова, Cylindrical 1– цилиндрическая, Spherical 2– сферическая и Toroidal 3 – тороидальная). В поле XC, YC, ZC Origin of coord systemвводим координаты начала системы координат. В полях THXY Rotation about local Z, THYZ Rotation about local X, THZX Rotation about local Y вводим значения углов, на которые необходимо повернуть систему относительно осей глобальной декартовой системы координат (рис.1.12). 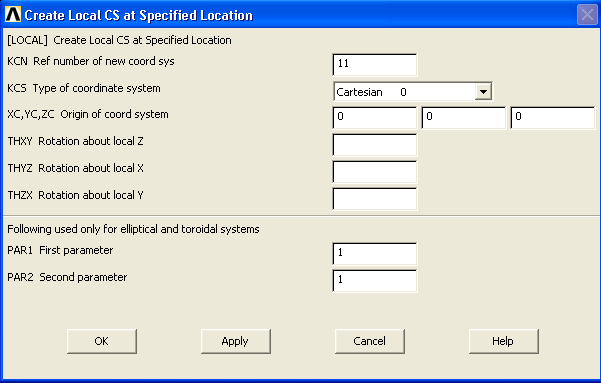 Рис.1.12 Задание локальной системы с использованием существующих узлов: Utility Menu > WorkPlane >Local Coordinate Systems > Create Local CS > By 3 Nodes + При появлении окна Create CS By 3 Nodes необходимо выбрать 3 узла с помощью „мыши” либо ввести их номера в командной строке открывшегося окна, разделяя их запятыми. Каждый из этих узлов имеет строго определенное назначение: - первый узел определяет начало локальной системы координат; - второй узел определяет положительную ориентацию оси Х этой системы координат; - третий узел определяет плоскость Х-У этой системы координат. После выбора узлов нажимаем ОК. В появившемся диалоговом окне в строке KCN Ref number of new coord sysвводим номер локальной системы координат (номер должен быть больше 10), а в строке KCS Type of coordinate system необходимо выбрать тип системы координат (рис.1.13). 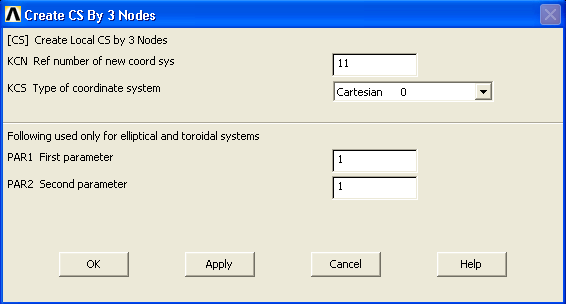 Рис.1.13 Задание локальной системы координат с использованием существующих точек: Utility Menu >WorkPlane > Local Coordinate Systems > Create Local CS > By 3 Keypoints + Порядок действий аналогичен вышеизложенному, но вместо узлов фигурируют точки. Задание локальной системы координат, начало которой определяется рабочей плоскостью: Utility Menu> WorkPlane> Local Coordinate Systems> Create Local CS > At WP Origin... При выполнении данного пункта центр и оси локальной системы координат будут совпадать с центром и осями рабочей плоскости. Локальные системы координат можно создавать либо удалять в любой момент работы с программой. Удалить локальную систему координат можно следующим образом: Utility Menu>WorkPlane>Local Coordinate Systems>Delete Local CS … В диалоговом окне Delete Local CSв строке KCN1 Delete coord system fromнужно указать номер удаляемой локальной системы координат (рис.1.14). 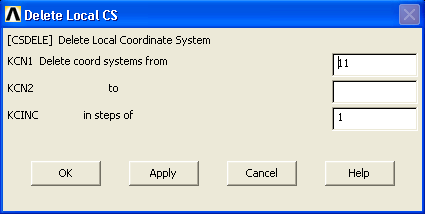 Рис.1.14 Чтобы удалить все локальные системы координат необходимо в строке KCN1 Delete coord system from ввести ALL и нажать OK.Возможно также удалить группу локальных координатных систем, для этого в строке KCN1 Delete coord system from вводим номер первой локальной системы координат, а в строке KCN2 to вводим номер последней локальной системы координат. В строке KCIN in Steps of указывается шаг удаления; при удалении всей группы шаг удаления равен единице. Для просмотра статуса всех глобальных и локальных систем координат выполним следующее: Utility Menu >List > Other> Local Coord Sys Систем координат может быть задано столько, сколько требуется, но активной в данный момент может быть только одна. Изначально активной является глобальная декартова система. Вновь введенная система автоматически становится активной. Если нужно активизировать одну из глобальных систем координат или одну из предварительно заданных необходимо проделать следующую операцию. Utility Menu > Work Plane > Change Active CS to > В выпадающем меню следует выбрать нужную систему координат: Global Cartesian Global Cylindrical Global Cylindrical Y Global Spherical Specified Coord Sys– при выборе данного пункта указывается номер системы координат. Working Plane Построение геометрической модели. Рабочая плоскость Решению любой задачи инженерной механики предшествует создание геометрической модели исследуемого объекта. Этот этап является, как правило, сложным и трудоемким, так как точность решения задачи зависит от степени близости создаваемой модели реальному объекту. Программа ANSYS располагает возможностями для импорта готовой модели из большого количества CAD-систем. При этом импортируемые модели могут быть файлами с расширением .sat, .igesи целым рядом других форматов. Однако импорт модели не всегда осуществляется корректно, и часто модель оказывается непригодной для дальнейшего использования в качестве рассчитываемого объекта. Вместе с тем ANSYS оснащен собственными, весьма мощными средствами трехмерного моделирования. Особое место в ряду этих средств занимает рабочая плоскость. Рабочая плоскость представляет собой бесконечную плоскость с двумерной системой координат с интервалом фиксации и сеткой отображения. Это своего рода „планшет”, на котором Вы пишите курсором. Рабочую плоскость можно задавать, перемещать и поворачивать. Когда происходит обращение к программе ANSYS, рабочая плоскость уже существует на плоскости х-у в глобальной декартовой системе координат; оси х-у рабочей плоскости коллинеарны с осями Х и Y глобальной декартовой системы координат. Задание рабочей плоскости возможно несколькими способами. Задание рабочей плоскости с помощью трех существующих точек Utility Menu > WorkPlane > Align WP with > Keypoints + При появлении окна Align WP with KPнужно выбрать 3 точки с помощью мыши либо ввести их номера в командной строке открывшегося окна разделяя их запятыми. Также в командной строке можно ввести координаты точек. Первая точка определяет начало системы координат рабочей плоскости; вторая определяет положительное направление оси x; третья — положительное направление отсчета для сектора. Задание рабочей плоскости с помощью трех существующих узлов Utility Menu > WorkPlane > Align WP with >Nodes + Алгоритм аналогичен вышеизложенному, только вместо точек выбираем узлы. Размещение рабочей плоскости на плоскости Х – Y (или R – Q) существующей системы координат: Utility Menu > WorkPlane > Align WP with >Active Coord Sys При выборе этого пункта система координат рабочей плоскости будет совпадать с активной в данный момент системой координат. Utility Menu > WorkPlane > Align WP with >Specified Coord Sys… При выборе данного пункта система координат рабочей плоскости располагается в выбираемой нами системе координат, номер которой указывается в окне Align WP with Specified CS. Utility Menu > WorkPlane > Align WP with > Global Cartesian При выборе этого пункта система координат рабочей плоскости располагается в глобальной декартовой системе координат Перемещение рабочей плоскости. Рабочую плоскость можно перемещать в новое положение, но параллельно первоначальному, используя любой из следующих способов. Перенос начала координат рабочей плоскости в среднее положение существующих точек: Utility Menu > WorkPlane > Offset WP to > Keypoints + Выбор точек можно производить мышью либо вводить их номера в командной строке открывшегося окна. Независимо от числа точек, которые определяют положение рабочей плоскости, начало координат этой плоскости будет располагаться в геометрическом центре фигуры образованной заданным множеством точек. Можно проделать ту же операцию с использованием узлов: Utility Menu > WorkPlane > Offset WP to > Nodes + Перенос начала координат рабочей плоскости в среднее положение заданных точек: Utility Menu > WorkPlane > Offset WP to > XYZ Locations + В командной строке открывшегося окна вводим координаты точек, разделяя их запятыми; после ввода координат каждой точки нажимаем Enter, после ввода последней – OK. Перенос начала координат рабочей плоскости в начало глобальной системы координат: Utility Menu > WorkPlane > Offset WP to > Global Origin Перенос начала координат рабочей плоскости в начало активной системы координат: Utility Menu > WorkPlane > Offset WP to > Origin of Active CS Рабочей плоскостью можно также управлять с помощью панели Offset WP. Utility Menu > WorkPlane > Offset WP by Increments… Панель Offset WPсостоит из нескольких секций (рис.1.15). 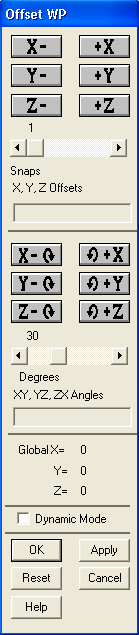 Рис.1.15 Каждая из этих секций выполняет определенный набор функций. Рассмотрим их подробно. Группа кнопок первой секции (рис.1.16,а) позволяет линейно перемещать рабочую плоскость вдоль осей X, Y, Z в положительном и отрицательном направлении. Бегунок Snapsустанавливает шаг линейного смещения рабочей плоскости. В строке X, Y, Z Offsetsможно указать координаты той точки, в которую необходимо переместить начало координат рабочей плоскости, при этом осей рабочей плоскости останутся неизменными. Кнопки второй секции (рис.1.16,б) позволяют поворачивать рабочую плоскость вокруг осей X, Y, Z в положительном и отрицательном направлениях. Бегунок Degreesпозволяет изменять шаг поворота рабочей плоскости. В строке XY, YZ, ZX Anglesможно указать углы поворота системы координат рабочей плоскости. В третьей секции (рис.1.16,в) содержатся данные информационного характера. Программа вычисляетположение центра системы координат рабочей плоскости относительно глобальной системы координат. Здесь же располагается опция Dynamic Mode, при включении которойпоявляется возможность управлять рабочей плоскостью с помощью “мыши”, при этом перенос и поворот рабочей плоскости осуществляется соответственно шагу, установленному на бегунках. Для перемещения рабочей плоскости нужно нажать левую кнопку мыши и удерживая ее, перемещать рабочую плоскость в нужном направлении. Для поворота нужно нажать правую кнопку мыши; при нажатии колеса прокрутки поворот рабочей плоскости осуществляется в плоскости экрана.
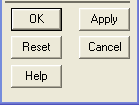
Рис.1.16 Последняя секция (рис.1.16,г)содержит группу кнопок, которые выполняют следующие функции: OK – выполняет указанные действия, закрывая диалоговое окно; Apply – выполняет указанные действия, оставляя окно открытым; Reset – отменяет произведенные действия; Cancel – закрывает диалоговое окно; Help – выводит на экран справку по данному окну. Настройка опций рабочей плоскости.Рабочую плоскость можно оснастить такими возможностями, как интервал фиксации, сетка отображения, погрешность выбора и тип системы координат. Для этого необходимо воспользоваться следующим пунктом меню: Utility Menu > WorkPlane > WP Settings… В открывшейся панели WP Settings(рис.1.17) можно выбрать тип системы координат рабочей плоскости. Для этого нужно выбрать один из следующих пунктов: Cartesian–декартова система координат; Polar–полярная система координат. Для удобства работы с рабочей плоскостью существуют графические опции. Возможны несколько вариантов отображения: Grid and Triad–отображение сетки рабочей плоскости и триады; Grid Only–отображение только сетки рабочей плоскости; Triad Only–отображение только триады рабочей плоскости. 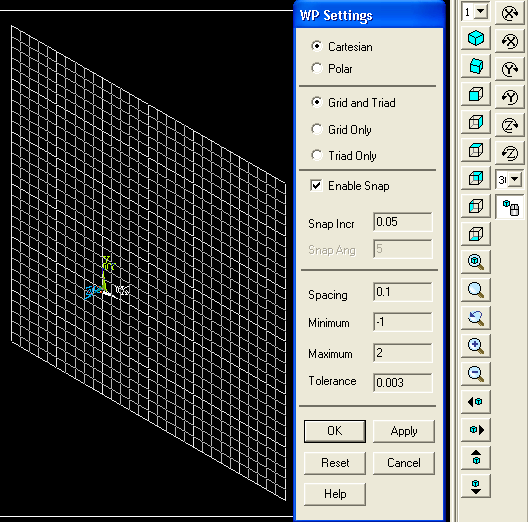 Рис.1.17 Существует возможность установить курсор в строго определенную точку рабочей плоскости. Для этого в строке Snap Incrнужно установить интервал фиксации, после чего любая создаваемая с помощью „мыши” точка будет иметь на рабочей плоскости координату, кратную целому числу интервалов фиксации. Причем, один интервал фиксации используется одновременно как для координаты X, так и для координаты Y рабочей плоскости. В строке Spacing указывается шаг разбиения сетки рабочей плоскости. Ячейки Minimum, Maximum определяют число единиц разбиения в отрицательном и положительном направлениях осей соответственно; при этом каждая такая единица разделена на число интервалов, указанных в строке Spacing. Ячейка Tolerance позволяет задать величину, которая является критерием принадлежности выбранного „мышью” объекта рабочей плоскости. Это означает, что даже если выбранный объект не лежит строго в рабочей плоскости, но находится в пределах заданной погрешности выбора, программа воспринимает его лежащим в рабочей плоскости. |