Перечень вопросов по тувд
 Скачать 1.76 Mb. Скачать 1.76 Mb.
|

1. Что такое синхронизация воздушного движения.Синхронизация движения - Связана с управлением потоками движения в пунктах сближения и пересечения (движения в районах крупных аэродромов или на пересечении воздушных трасс) -Управление и обеспечение последовательности движения на земле и в воздухе - Как функция связана с согласованием спроса и пропускной способности и с обеспечением эшелонирования и в будущем может практически утратить отличие от этих функций Синхронизация движения заключается в установлении и поддержании безопасного, упорядоченного и эффективного потока воздушного движения на всех этапах полета. На этапе вылета синхронизация движения будет заключаться в согласовании вылетов с обстановкой в воздухе. Оптимизация поток на вылет будет достигаться с помощью средств, которые обеспечивают повышение эффективности наземной деятельности в аэропорту и совершенствования оперативной оценки интенсивности движения на вылете и в воздушном пространстве на маршруте. На этапе полета по маршруту синхронизация движения будет заключаться в установлении очередности, интеграции и разделении потоков с целью уменьшить потребности в тактическом управлении конфликтными ситуациями. Улучшение последовательности потоков будет достигаться с помощью средств, которые позволяют более эффективно прогнозировать соотношение потребностей и возможностей в точках пересечения, улучшить оперативную оценку интенсивности движения на участках прибытия и вылета, шире использовать бортовое оборудование для поддержания группового эшелонирования или определения местоположения, активнее использовать динамичные маршруты, опираясь на более совершенные навигационные возможности. 2. Двойственность задач линейного программирования, примеры практического применения в системе ОРВД. (ПОВТОР)БИЛЕТ 291. Определить понятия условно-оптимального управления, условных затрат в методе динамического программирования.Динамическое программирование (динамическое планирование) - метод нахождения оптимальных решений в задачах с многошаговой (многоэтапной) структурой. В процессе оптимизации управления методом динамического программирования многошаговый процесс проходится дважды. Первый раз — от конца к началу, в результате чего находятся условно-оптимальные управления и условно-оптимальное значение функции цели для каждого шага, в том числе оптимальное управление для первого шага и оптимальное значение функции цели для всего процесса. Второй раз — от начала к концу, в результате чего находятся уже оптимальные управления на каждом шаге с точки зрения всего процесса. Набор оптимальных управлений, зависящих от возможных исходов предыдущего этапа, называется условно-оптимальным решением . Завершив анализ конечного этапа, рассматривают аналогичную задачу для предпоследнего этапа, требуя, чтобы функция цели достигала экстремального значения на двух последних этапах вместе. Это дает условно-оптимальное решение на предпоследнем этапе . 2. Постановка задачи математического программирования. Определение критерия оптимизации, целевой функции, допустимого, оптимального, рационального вектора решений. (ПОВТОР)БИЛЕТ 301. Определение допустимых значений характеристик процессов.тут мб то что пропускная способность определяется предельной загруженностью диспа, и там уже от себя: итог системы орвд- уровень безопасности который находиться в прямой зависимости от организации, планировании ВД, личностного фактора и автоматизации систем УВД 2. Классификация методов оптимизации. (ПОВТОР)БИЛЕТ 311. Какой поток называют Простейшим потоком Пуассона.Если интервал между событиями τj равен константе или определен какой-либо формулой в виде: tj = f(tj – 1), то поток называется детерминированным. Иначе поток называется случайным. Случайные потоки бывают: ординарные: вероятность одновременного появления двух и более событий равна нулю; стационарные: частота появления событий λ(t) = const(t); без последействия: вероятность появления случайного события не зависит от момента совершения предыдущих событий. Пуассоновский поток За эталон потока в моделировании принято брать пуассоновский поток. Пуассоновский поток — это ординарный поток без последействия. Как ранее было указано, вероятность того, что за интервал времени (t0, t0 + τ) произойдет m событий, определяется из закона Пуассона: a — параметр Пуассона. Если λ(t) = const(t), то это стационарный поток Пуассона (простейший). В этом случае a = λ · t. 2. Формулировка ошибки при ОВД. (ПОВТОР)Ошибка определяется как "действие или бездействие диспетчера управления воздушным движением, приводящее к отклонению от организационно обусловленных, либо планируемых или ожидаемых диспетчером управления воздушным движением результатов". Ошибки могут быть спонтанными (т. е. без прямой связи с конкретными, очевидными угрозами) или непосредственно связанными с угрозами, или быть частью цепи ошибок. Примерами таких ошибок являются: необнаруженные ошибки пилота при обратном считывании информации; разрешение воздушному судну или транспортному средству использовать уже занятую ВПП; выбор ненадлежащей функции в автоматизированной системе; ошибки при вводе данных и т. д. В концепции КУО используется три основные категории ошибок, такие как ошибки управления оборудованием, процедурные ошибки и ошибки связи. При любом другом подходе к классификации ошибок используются общие факторы, влияющие на процесс мышления человека и обработки им информации, и при этом проводятся различия между ошибками при планировании или выполнении функции и ошибками, обусловленными недостатками знаний, неправильно применяемыми правилами или невнимательностью. БИЛЕТ 321. Информационное обеспечение процессов ОрВД его эффективность.Информационное обеспечение процессов ОрВД Выбор методов и размещения технических средств навигации, наблюдения и связи Выбор методов и средств обработки информации о движении ВС Выбор методов и средств отображения информации о состоянии воздушной обстановки Автоматизация процессов анализа воздушной обстановки и подготовки принимаемых диспетчером решений ИЗ КРЫЖАНОВСКОГО Эффективность информационных технологий системы организации воздушного движения в значительной мере зависит от информационного обеспечения. Эффективность всей системы организации воз-душного движения –это ее результативность при выполнении поставленных задач. Информационная система, как составляющая информационно-управляющей системы организации воздушного движения должна соответствовать определенным требованиям. Выполнение требований системы дает возможность органам обслуживания воздушного движения принимать и реализовывать решение эффективного управления воздушным движением, т.е эффективность системы организации воздушного движения зависит от эффективности информационных техно-логий и эффективности взаимодействия диспетчера с экипажем воздушного судна. Если считать взаимодействие диспетчера с экипажем безупречным, то эффективность системы организации воздушного движения будет определяться эффективностью информационных технологий аэронавигационного обеспечения. Направление дальнейших исследований связано с анализом принципов автоматизации процессов организации воздушного движения и обеспечением информационной безопасности. 2. Общий вид классификации задачи оптимизации.Вид задачи оптимизации и соответственно выбор того или иного метода нахождения оптимального решения зависят от вида целевой функции и вида функций-ограничений. Классифицируя задачи оптимизации, в самом общем виде можно выделить задачи оптимизации без ограничений или, точнее, с простыми ограничениями, которые легко проверить – ограничения вида x<=(=>)b и задачи с ограничениями. Задача с ограничениями - задача математического программирования. Она подразделяется на подклассы - ЗЛП и ЗНЛП. Выделяют также задачи параметрического, целочисленного, стохастического программирования. Задача с ограничениями называется еще задачей математического программирования. В зависимости от того, к какому из названных классов относится конкретная задача, для ее решения применяются, соответственно, методы безусловной или методы условной оптимизации. БИЛЕТ 331. Постановка задачи, основные понятия, динамического программирования. (ПОВТОР)2. Формы записи задач линейного программирования и их взаимные преобразования.ПОВТОР БИЛЕТ 341. Что такое синхронизация воздушного движения. (ПОВТОР)2. Двойственность задач линейного программирования, форма записи и примеры в системе ОрВД. (ПОВТОР)БИЛЕТ 351. Какие группы задач характеризуют условия решений по ОВД.Центральным моментом в деятельности диспетчера, образующим основное звено любого из моделирующих ее алгоритмов, считается принятие решений в различных задачах управления. Анализ наиболее удачных фрагментов моделей и эксперименты в процессе непосредственной деятельности диспетчера при УВД на трассах позволили выделить три группы задач, характеризующих условия принятия решения: 1. Задачи релейного типа, когда диспетчер принимает решение в виде разрешения или запрещения. 2. Задачи траекторного управления (наиболее характерные, например, для диспетчеров, осуществляющих управление при обходе грозовых очагов, запретных зон, при выходе в определенную точку и др.). 3. Задачи выбора, когда диспетчеру необходимо из множества допустимых альтернатив-вариантов выбрать наиболее, по его мнению, рациональную Факторы, характеризующие проблемную ситуацию, условно делятся на две группы: Управляемые – факторы, выбор которых зависит от ЛПР, - суть поставленных целей, варианты их достижения, субъективные оценки вариантов и степени достижения целей. Неуправляемые - факторы не зависят от ЛПР. Они определяют объективные признаки вариантов и отчасти устанавливают ограничения на выбор возможных вариантов Факторы подразделяются также: - на определенные, или детерминированные, с известными и/или заранее заданными точными характеристиками - вероятными, или стохастические, с известными и/или заранее заданными случайными характеристиками - неопределенные, или неизвестные, с нечетко определенными и/или известными характеристиками, но иногда с известной областью изменения их значений 2. Какие методы используются ТМО. (ПОВТОР)БОНУСХарактеристика процессов основывается на комплексном системном подходе Математическая формулировка оптимального/эффективного воздушного потока: λ=µ Принятие решений при УВД начинается со входа в зону ВС ОВД – с получения заявки на ОВД Среднее число заявок в системе =λ входного потока + среднее время пребывания заявки в системе Оценка риска = величина тяжести риска * величину вероятности Экземпляры – примеры при моделировании в оптимизации процессов ОВД Основа моделирования процессов в системе ОрВД – это выбор процесса, описания его состояния и изменения его количественных характеристик Основа принятия решений – нехватка информации и ее анализ Основа тактики ОВД – «упреждающие решения» = экстраполяция развития ситуации Основа комплексного подхода – это взаимосвязь Эффективность оперативного (непосредственного) ОВД определяет воображение при тактическом ОВД Стратегическое → тактическое → оперативное Ошибки при ОВД – неправильные действия или бездействия диспетчера В системе ОрВД принятие решений базируется на принципе гарантийного результата: Принимаются только те решения, эффективность которых гарантирована в любой, возможно даже наихудших условиях Количество информационных потоков, их полнота и уровень автоматизации ОВД выражается во временных затратах при восприятии информации, анализе и принятии решений Нагрузка на систему в зоне = количество ВС, одновременно находящихся в зоне Динамическая нагрузка на диспетчера = количество ВС, одновременно находящихся на связи Средство исследования процессов в системе ОрВД – это потоки информации (идентификация процессов) Количественные характеристики процесса определяют входной и выходной сигналы Принятие решений в системе ОрВД = анализ информации о системе и ее составляющих Неопределенность → риск → потеря Принятие решений в условиях неопределенности = вероятность развития вариантов события неизвестны Принятие решений в условиях риска = каждой ситуации может быть задана вероятность его (риска) осуществления. +++Не из списка, но тоже полезно знать+++ +++Туман - метеорологическое явление с видимостью менее 1000 м (дымка - менее 4000м) +++Есть ли допуски и на посадку в абсолютном тумане. Есть. Instrument Landing System (ИЛС) состоит из курсо-глиссадой системы и маркера на ближнем приводе. 3 категории ИКАО этот ИЛС бывает А, В и С. Вот категории С самолёт сам может садится как сестра сказала ноль на ноль(горизонтальная и вертикальная видимость 0) +++Комплексный подход, который применим к исследованию основных задач, возникающих в процессах УВД определяется тесной взаимосвязью факторов и процессов, влияющих на качество процессов непосредственного УВД +++Среднее число заявок в системе равно произведению интенсивности входного потока на среднее время прибывания заявки в системе +++ Схема работы вопросно-ответной системы 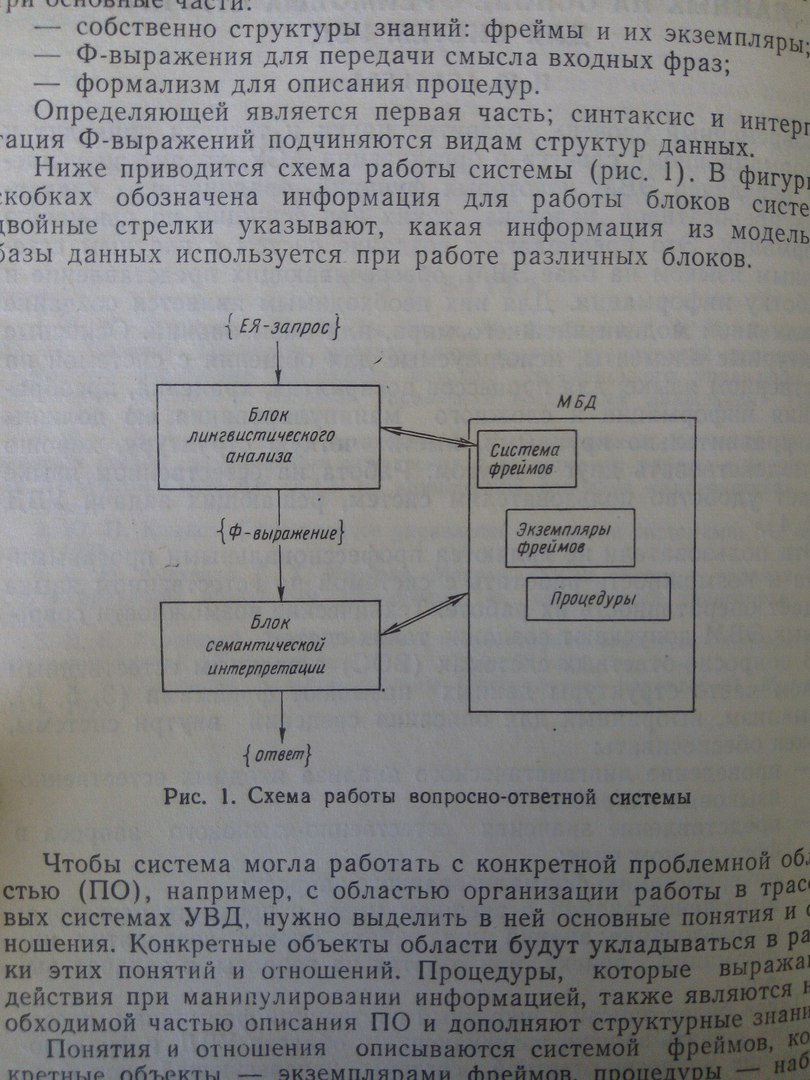 +++ ПРИНЯТИЕ РЕШЕНИЙ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ ОСНОВЫВАЕТСЯ НА ПРИНЦИПЕ ГАРАНТИЙНОГО РЕЗУЛЬТАТА ++++++Существуют следующие способы завершения конфликта: 1. Устранение объекта конфликта. 2. Замена одного объекта другим. 3. Устранение одной стороны участников конфликта. 4. Изменение позиций одной из сторон. 5. Изменение характеристик объекта и субъекта конфликта. 6. Получение новых сведений об объекте или наложение на него дополнительных условий. 7. Недопущение непосредственного или опосредованного взаимодействия участников. 8. Приход участников конфликта к единому решению или обращение их к «арбитру» при условии подчинения любому его решению. +++++++ |