Пояснительная записка Цель данного пособия помочь студентам глубже разобраться в разделах теоретической механики Кинематика
 Скачать 1.98 Mb. Скачать 1.98 Mb.
|

|
Тест №13 Законы Ньютона. Сила. Единицы силы Для каждого вопроса группы А указать правильный ответ из группы А, для каждого вопроса группы В указать правильный ответ из группы В Вопросы группы А Что называется инерцией тела? В чем состоит первый закон Ньютона? Как будет двигаться тело без воздействия на него других тел? Что называется силой? Чем характеризуется сила как вектор? В чем состоит второй закон Ньютона? Что называется массой тела? Что такое вес тела? В чем состоит третий закон Ньютона? Вопросы группы В Как математически записывается второй закон Ньютона? Как математически записывается третий закон Ньютона? Укажите формулу веса тела Что принимается за единицу силы в СИ? Как называется единица веса в СИ? Что принимается за единицу силы в системе МКГСС? Как называется единица веса в СИ? Как движется тело под действием постоянной силы? Какое соотношение между 1 килограмм-силой и 1 Н?
Две задачи динамики материальной точки Уравнения движения материальной точки Свободная и несвободная материальная точка. Материальную точку, на которую не наложены никакие связи, называют свободной, а ее движение — свободным. Такая материальная точка может занимать любое положение в пространстве, и ее движение зависит только от начальных условий и действующих на нее активных (заданных) сил. Материальную точку, на движение которой наложены какие-либо связи, называют несвободной, а ее движение несвободным. Такая точка под действием активных сил не может, благодаря наложенным на нее связям, занимать произвольное положение или иметь произвольную скорость. На основании второй и третьей аксиом динамики имеем mα = P = ΣPi, где m — масса материальной точки; α— ее ускорение; Р — равнодействующая всех сил, приложенных к этой точке. При свободном движении в ΣPi войдут только активные силы. Если же движение несвободное, то сначала отбрасывают связи и заменяют их действие силами реакций связей (т. е. применяют принцип освобождаемости от связей). Затем несвободную материальную точку рассматривают как свободную, тогда в число ΣPi; войдут и активные силы и реакции связей. Обычно массу материальной точки находят как отношение ее веса G, выраженного в Н (СИ), к ускорению силы тяжести g, в м/сек2, т. е. m=G/g У  равнения движения материальной точки в декартовой системе координат. Проектируя векторное равенство mα = P = ΣPi на оси декартовой системы координат, получаем уравнения движения материальной точки в этой системе: равнения движения материальной точки в декартовой системе координат. Проектируя векторное равенство mα = P = ΣPi на оси декартовой системы координат, получаем уравнения движения материальной точки в этой системе:mαx=ΣXi=X mαy=ΣYi=Y mαz=ΣZi=Z где αх, αy, αz — проекции ускорения; X, Y, Z— проекции равнодействующей силы на соответствующие оси. Так как проекция ускорения на какую-либо ось — есть первая производная от соответствующей проекции скорости или вторая производная от координаты, то эти уравнения можно записать иначе: m dx/dt= ΣXi m dy/dt= ΣYim dz/dt= ΣZi или m  d 2x/dt 2= ΣXi d 2x/dt 2= ΣXim d 2y/dt 2= ΣYi m d 2z/dt 2= ΣZi Уравнения движения, записанные в такой форме, называют дифференциальными уравнениями движения материальной точки. Если точка движется прямолинейно, то, принимая траекторию точки за ось x, получаем ma = ΣXi Уравнения движения в естественных осях. Проектируя векторное равенство mα = P = ΣPi на естественные оси, получаем уравнения движения в естественных осях: mat =Pt man = Pn где at и an -тангенциальное и нормальное ускорения точки; Pt и Pn —проекции действующей силы (равнодействующей) соответственно на касательную и нормаль. Эти же уравнения можно записать в дифференциальной форме: m dv/dt= Pt m v2/ρ= Pn, где v — скорость точки; ρ — радиус кривизны траектории.. Пользуясь данными уравнениями , можно решать две основные задачи динамики точки. Первая основная задача динамики материальной точки По заданному закону движения x = f1(t),y = f2(t), z= f3(t) и массе m материальной точки найти силу Р, действующую на эту точку. Эта задача сводится к нахождению ускорения. Методы определения ускорения зависят от способа задания движения. Определенные проекции ускорения на декартовы (или естественные) оси координат следует подставить в уравнения движения и найти проекции действующей (равнодействующей) силы на соответствующие оси: Х = mах; Y = may Z = maz. Модуль и направление силы, действующей на точку, находят по формулам: cos (Р, х) = Аналогично решаем задачу в естественных осях: Pt = mat; Pn = man Откуда cos(P, t)= Методические указания к решению задач При решении первой основной задачи динамики точки рекомендуется придерживаться следующего порядка: 1. Выбрать объект рассмотрения, приняв его за материальную точку. Изобразить её в текущий момент времени. 2. Приложить активные (заданные) силы, действующие на точку. 3. Освободить точку от связей в (случае несвободной точки), заменив действие отброшенных связей реакциями. 4. Выбрать систему координат. 5. Составить уравнения движения точки (в тех случаях, когда траектория точки — окружность, удобнее составлять уравнения движения в естественной форме). 6. Определить проекции ускорения на выбранные оси координат по заданному закону движения и подставить в уравнения движения. 7. Найти проекции действующей (равнодействующей) силы на оси координат. 8. При необходимости по формулам cos (Р, х) = Pt = mat; Pn = man cos(P, t)= Pt/P; cos(P, n) = Pn/P определить модуль и направление искомой силы. Пример 10 Каково натяжение троса, на котором поднимается лифт весом G=10000 H с грузом Q = 25000 н, если за t = 2 сек скорость подъема возросла с V0=1 м/сек до Vk = 2,5 м/сек, движение считать равноускоренным (рис.9) 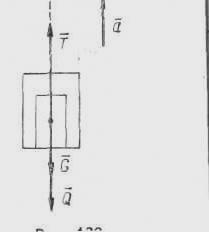 Рис. 9 Решение. Принимаем лифт с грузом за материальную точку. К материальной точке приложены активные силы: G — вес лифта; Q — вес груза. Отбрасываем связь: разрезаем трос и заменяем его действие натяжением Т. Направляем ось х. В данной задаче все силы направлены вдоль оси х, поэтому достаточно составить одно уравнение движения: mах=ΣX= T-G-Q Согласно условию, лифт движется с постоянным ускорением масса материальной точки Подставляем m и ах в уравнения движения Полученное уравнение содержит одно неизвестное искомое натяжение T=(G+Q) (1+(Vк- V0)/ g t=( 10000+25000) (1+(2,5-1,0)/(9,8 -2)=37700 Н Вторая основная задача динамики материальной точки По заданным силам P(ΣPj), действующим на материальную точку, и её массе m найти закон движения:  x = ƒ1 (t) x = ƒ1 (t) y = ƒ2 (t) z = ƒ3 (t) Зная силы, из уравнений движения можно определить ускорение. Но одного ускорения недостаточно для определения закона движения. Необходимо знать скорость и положение точки в начальный момент времени, т. е. начальные условия. Рассмотрим простейший случай — все силы, действующие на точку, постоянны (тогда и ускорение, получаемое точкой, тоже постоянно), т. е. точка должна двигаться равноускоренно или равнозамедленно. При решении второй задачи динамики точки необходимо придерживаться следующего порядка: 1. Принять рассматриваемый объект за материальную точку и изобразить ее в текущий момент времени. 2. Приложить активные (заданные) силы, действующие на материальную точку. 3. Освободить точку от связей (в случае несвободной точки), заменив действие связей реакциями. 4. Выбрать систему координат (если точка движется по окружности, то следует выбрать систему естественных осей). 5. Составить уравнения движения точки в выбранной системе координат. 6. Выразить проекции ускорения через искомые кинематические элементы (проекций скоростей, координаты, время) и подставить в уравнения движения. 7. Решить уравнения относительно искомых величин. Кинетостатика материальной точки Силы инерции Всякое ускорение — следствие действия силы, а сила - мера механического взаимодействия двух материальных точек. Силой инерции Ри материальной точки М называют произведение массы этой точки на ее ускорение, взятое с обратным знаком: Ри= – mα Сила инерции Ри материальной точки M, движущейся под действием активной силы Р и силы реакции связи N, реально существует, но она приложена не к точке М, а к телам, механически взаимодействующим с точкой М и к связям, наложенным на эту точку. При прямолинейном движении направление ускорения совпадает с траекторией. Если движение ускоренное, то сила инерции направлена в сторону, противоположную скорости, если замедленное, то сила инерции совпадает по направлению со скоростью. При криволинейном движении полную силу инерции Ри целесообразно разложить на две составляющие: нормальную (центробежную) силу инерции Риn- mαn и тангенциальную (касательную) силу инерции Pиt= - mαt. Тогда Pи= Риn+ Pиt Модуль полной силы инерции определяют по формуле При решении задач обычно ограничиваются определением составляющих Риn и Pиt Частные случаи: а) движение равномерное и прямолинейное. Тогда dv/dt=αt=0; ρ=∞ и Pи= m √(dv/dt)2 + (v2/ρ)2= m √0+(v2/∞)2 =0 б) движение прямолинейное с постоянным ускорением α. Тогда dv/dt= αt= α; ρ=∞ и Pи= m √α2 + (v2/∞)2= m α в) равномерное движение по окружности радиусом г с угловой скоростью ω. Тогда dv/dt= 0; ρ=r; v=ω r; Pи= m√(0)2 + (ω2 r2/ r)2 =m ω2r г) равноускоренное движение по окружности радиусом r с угловым ускорением ε. При этом dv/dt=αt= ε r; ρ=r; v=ω r и Pи=m √ (ε r)2 + (ω2 r2/ r )2= m r √ ε2 + ω4 Полную силу инерции лучше представить двумя составляющими тангенциальной Риt = m ε r и нормальной Риn = m ω2r Принцип Даламбера (кинетостатики) Принцип Даламбера для материальной точки формулируется следующим образом: в каждый момент времени все силы, действующие на точку, уравновешиваются силой инерции, т. е. ΣР + РИ = 0. П  роектируя векторное равенство на оси декартовой системы координат, получаем три скалярных равенства: роектируя векторное равенство на оси декартовой системы координат, получаем три скалярных равенства:ΣX+ РИx=0 ΣY+ РИy=0 ΣZ+ РИz=0, где РИx, РИy, РИz —проекции силы инерции на соответствующие оси. Проектируя на естественные оси, получаем: ΣPt +Pиt =0 ΣPn +Pиn =0 При этом в число действующих сил ΣP входят активные силы и реакции связей. Принцип Даламбера позволяет задачи динамики решать как статические. Добавив силы инерции, можно применять все теоремы, законы и правила, доказанные и принятые в статике. Раздел, связанный с принципом Даламбера, получил название «кинетостатика» (что означает статика в движении). В механической системе материальных точек, некоторым образом связанных между собой, можно рассматривать кинетостатическое равновесие не только каждой точки, но и всей системы в целом и любой ее части. При этом необходимо прикладывать силы инерции к каждой материальной точке. Всякое твердое тело можно представить как систему материальных точек. Приложив к каждой точке силу инерции и сложив их, определяем силу инерции твердого тела. Она приложена в центре его тяжести С и равна РИ= - mαt, где m — масса тела, а αt — ускорение центра тяжести. Принцип Даламбера для движущегося тела имеет такое же выражение, как и для материальной точки: ΣPi+Pи=0, где ΣPi — сумма всех сил, действующих на тело (активных сил и реакций связей). Для направления вектора силы инерции необходимо знать направление ускорения. Выберем любое направление и решим задачу. Если в результате решения ускорение получается со знаком «плюс», то направление выбрано верно, если со знаком «минус», значит, надо изменить его на противоположное. Необходимо учитывать, что только при решении задач методом кинетостатики необходимо добавлять силы инерции. |