ТММ РАСЧЁТЫ. Содержание курсовой работы
 Скачать 87.27 Kb. Скачать 87.27 Kb.
|

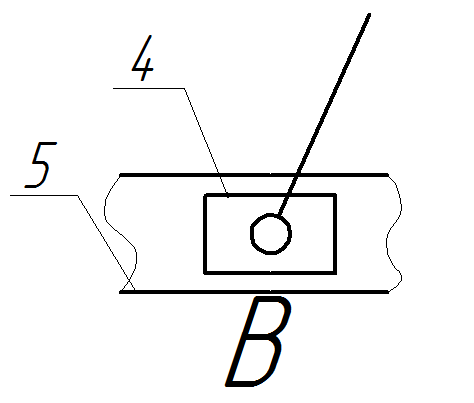
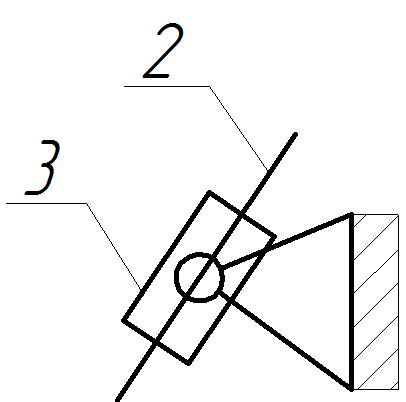
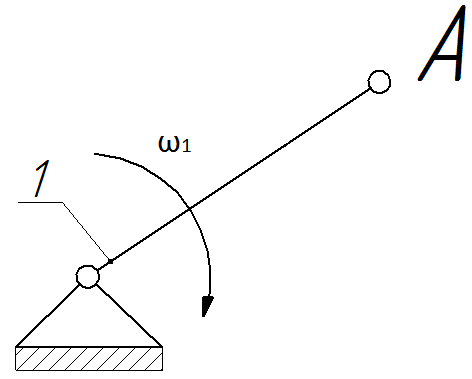
 СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ ЧАСТЬ I 1.Произвести структурный анализ механизма: а) определить степень подвижности механизма; б) разбить механизм на группы Ассура; в) определить класс механизма. 2. Выполнить кинематическое исследование механизма методом планов скоростей и ускорений: а) построить кинематическую схему механизма в 12-ти положениях; б) построить план скоростей для одного из положений рабочего хода; в) построить планы ускорений для одного из положений рабочего хода; г) построить диаграмму перемещений основной точки исполнительного (выходного) звена. 3. Выполнить кинематическое исследование планетарного механизма графическим и аналитическим методами. ЧАСТЬ II 1. Выполнить силовой расчет механизма: а) изобразить кинематическую схему механизма с заданными силами и соответствующий план ускорений в одном положении рабочего хода; б) определить силы веса, силы инерции и моменты сил инерции звеньев для выбранного положения; в) изобразить группы Ассура и входное звено с приложенными силами; г) определить реакции в кинематических парах графоаналитическим методом. ЗАДАНИЕ ДЛЯ КУРСОВОЙ РАБОТЫ Дан одноцилиндровый поршневой компрессор простого действия. Движение от внешнего источника энергии (электродвигателя) передается плоскому рычажному механизму через планетарный редуктор с простой зубчатой передачей. Преобразование вращательного движения кривошипа в возвратно-поступательное движение поршня осуществляется 6-звенным кулисным механизмом. Он состоит из кривошипа 1, кулисного камня 2, вращающейся кулисы 3, шатуна 4 и ползуна (поршня) 5. Особенность механизма в том, что при равномерном движении кривошипа 1 кулиса 3 вращается неравномерно, сообщая через шатун 4 ползуну 5 возвратно-поступательное движение с симметричным законом изменения ускорения. На поршень 5 при его перемещении вправо воздействует сила полезного (технологического) сопротивления Р5, характеризующая силу давления сжимаемого воздуха. Таблица 1 — Исходные данные для построения и исследования механизма
ВВЕДЕНИЕ Задачей настоящей курсовой работы является исследование заданного рычажного механизма и планетарной передачи с использованием общих методов применяемых в ТMM В двух разделах работы необходимо выполнить: 1.структурное и кинематическое исследование плоского рычажного механизма и кинематическое исследование зубчатого планетарного механизма ; 2.силовой расчет механизма; 1. СТРУКТУРНОЕ И КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА 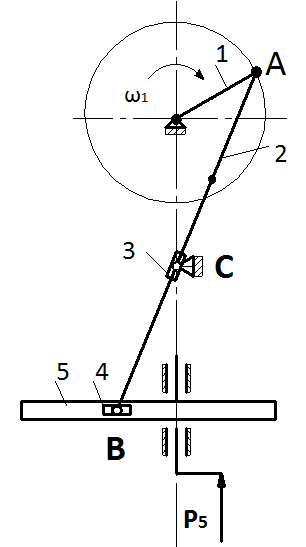 Рисунок 1.1 Схема механизма Механизм (Рис.1.1) состоит из 5 подвижных звеньев, соединённых между собою парами 5 класса (5 пар вращательных и2 поступательных). Определяем степень подвижности оптимального по структуре механизма по формуле. П.Л. Чебышева: W0 =3n -2p5 –p4 Где n=5 –число подвижных звеньев; P5 =7 –число кинематических пар 5 класса; P4 =0 – число кинематических пар 4 класса; Подставив данные в формулу (1.1), получим W0 =3∙5-2∙7-0=1 Механизм обладает 1-й степенью подвижности. Согласно полученному результату для определенности движения всех звеньев механизма необходимо иметь одно начальное звено. При выявлении структурных групп руководствуемся следующими правилами: — разбиваем механизм на группы последовательно, в порядке обратном его сборке, начиная с самой удаленной от входного звена (в состав которой входит исполнительное звено 5); (рис. 1.1) — стремимся, прежде всего, выделить простейшие по структуре двухповодковые группы Ассура (состоящие из 2-х звеньев) и лишь когда это не удается, выделяем более сложные 4-звенные структуры; — после отделения от механизма каждой выявленной структурной группы проверяем по формуле Чебышева степень подвижности оставшейся кинематической цепи, она не должна измениться — после отделения всех структурных групп Ассура должно остаться только одно входное звено (в случае, если степень подвижности механизма W=1, которое вместе со стойкой и соединяющим их шарниром образует первичный механизм (или механизм 1-го класса). Значение W0=1 означает, что механизм имеет одно входное звено (звено 1). Разбиваем механизм на группы Асура. Сначала отделяем группу, состоящую из звеньев 4 и 5. Это группа 2 класса 2 порядка 3 вида. Затем отсоединяем группу, состоящую из звеньев 2 и 3. Это группа 2 класса 2 порядка 5 вида. Оставшееся входное звено 1 и стойка образуют первичный механизм (механизм 1-го класса) Результаты структурного анализа представлены в таблице 1. Запишем формулу строения механизма: Мех 1 кл. (0,1) + гр.2 кл. (2,3) + гр. 2 кл. (4,5) По наивысшему классу группы Ассура устанавливаем, что рассматриваемый механизм 2 класса 1.2 Кинематическое исследование механизма По закону движения входного звена требуется определить перемещение , скорости и ускорения остальных звеньев механизма; Таблица 1-Структурный анализ механизма
Кинематическое исследование механизма представлено на листе 1 Исследование включает в себя: а) графическое определение перемещений звеньев; б) определение скоростей звеньев механизма; в) определение ускорений звеньев механизма; г) построение диаграмм перемещения, скорости и ускорения выходного звена механизма
|