Лекции. Термины и определения
 Скачать 29.73 Mb. Скачать 29.73 Mb.
|

|
Высота подъема крюка Н (см. рис. 4) - расстояние от уровня стоянки крана до центра зева крюка, находящегося в верхнем (высшем) рабочем положении. Глубина опускания крюка h- расстояние от уровня стоянки крана до центра зева крюка, находящегося в нижнем (низшем) рабочем положении. Параметры Lи А (А1или А2)определяют возможность перемещения груза по горизонтали, а параметры Н и h- по вертикали. При работе на выносных опорах значение А2зависит от значения В - расстояния между вертикальными осями, проходящими через середины опорных элементов двух соседних выносных опор, когда они находятся в рабочем положении: A2 = L-0,5В. Это расстояние называется поперечной B1 или продольной В2(см. рис. 5, 6) базой выносных опор. При вращении поворотной части крана стреловое оборудование перемещается относительно шасси машины в некотором секторе о, а, b, с, ..., о, образуя рабочую зону. Если через точки опирания выносных опор провести окружность a', b', с', ..., а', то в рабочей зоне образуется кольцо а, b, с, ..., с', b', а', а, в котором кран может производить подъем, перемещение и опускание груза. Площадь а, b, с,..., с', b', а', а называется полезной рабочей зоной. Центральный угол , соответствующий двум крайним положениям стрелового оборудования, называется зоной работы крана. Если кран может работать при любом положении стрелового оборудования относительно шасси, то зона работы крана = 360°. Рабочий цикл Т - время, затрачиваемое с момента начала подъема груза до момента начала подъема следующего очередного груза. Производительность крана П - общая масса грузов и конструкций, перемещаемых или монтируемых краном за час (т/ч) или смену (т/смена). Часто производительность крана измеряют по числу рабочих циклов, совершаемых краном в единицу времени. Зная производительность крана, легко подсчитать число рабочих циклов, необходимое для выполнения какого-нибудь заданного объема работ в требуемые сроки. Производительность крана зависит не только от его конструкции, но и от технологии и организации производства работ. Поэтому, называя производительность крана, указывают и условия производства работ. Если такого указания нет, имеют в виду среднее значение этого параметра. Скорость подъема или опускания груза vn- скорость вертикального перемещения груза. Скорость посадки vм- минимальная скорость опускания груза при монтаже и укладке конструкций или грузов, при работе с предельными грузами и т. п. Частота вращения п поворотной части крана – число оборотов поворотной части в единицу времени. Скорость изменения вылета vB - горизонтальная составляющая скорости перемещения крюка при изменении его вылета. Время изменения вылета t- время, необходимое на изменение вылета от одного предельного положения стрелы до другого. При невыдвижных стрелах параметры vви tопределяют при изменении вылета за счет подъема (опускания) стрелы, а при выдвижных и телескопических стрелах - при изменении вылета как за счет подъема (опускания) стрелы, так и за счет выдвижения ее секций. Скорость движения секций выдвижных или телескопических стрел vс - скорость движения секций относительно основной (невыдвижной) секции при изменении длины стрел. Рабочая скорость передвижения крана vпр - скорость передвижения крана по рабочей площадке со стреловым оборудованием, находящимся в рабочем положении, и подвешенным грузом, если передвижение с грузом предусмотрено его технической характеристикой. Транспортная скорость передвижения крана vп.т - скорость передвижения крана, стреловое оборудование которого находится в транспортном положении. Общая (эксплуатационная) масса крана Gp - масса крана со стреловым оборудованием и противовесом при полной заправке крана топливосмазочными материалами. Конструктивная масса крана GK - масса крана со стреловым оборудованием и противовесом. Нагрузка на ходовую ось Роили колесо Рк- наибольшая вертикальная нагрузка, приходящаяся на одну ось или одно колесо в транспортном положении крана. Нагрузка на выносную опору Рв.о - наибольшая вертикальная нагрузка, приходящаяся на одну опору при работе крана (стрела располагается над опорой). Среднее давление выносной опоры на грунт γв.о - отношение нагрузки на выносную опору к площади ее башмака или инвентарной подкладки. Колея крана К- расстояние между вертикальными осями, проходящими через середины опорных поверхностей ходового устройства: K1- при односкатных, К2- двускатных колесах. База крана Вк - расстояние между вертикальными осями передних и задних ходовых тележек или колес. База баланснрной тележки шасси Вт- расстояние между вертикальными осями передних и задних колес одной ходовой тележки крана. Минимальный радиус поворота шасси Rmin (рис. 6, г) - расстояние от центра поворота до средней точки опоры наиболее удаленного управляемого колеса при максимальном угле его поворота. Габаритный коридор шасси Дш - ширина полосы, в которую при минимальном радиусе поворота шасси крана Rminвписывается шасси. Минимальный радиус поворота крана RK (рис. 7, а) - расстояние от центра поворота до наиболее удаленной точки крана при минимальном радиусе поворота шасси крана. Минимальная ширина разворота Дг - ширина полосы, на которой кран может развернуться на 180° при минимальном радиусе поворота шасси крана. Габаритный коридор въезда Д2(рис. 7,6) и выезда Д3 крана - ширина полосы, в которую при минимальном радиусе поворота шасси вписывается кран при въезде в поворот и выезде из него. Преодолеваемый уклон пути - наибольший угол подъема, преодолеваемый краном, двигающимся с постоянной скоростью. 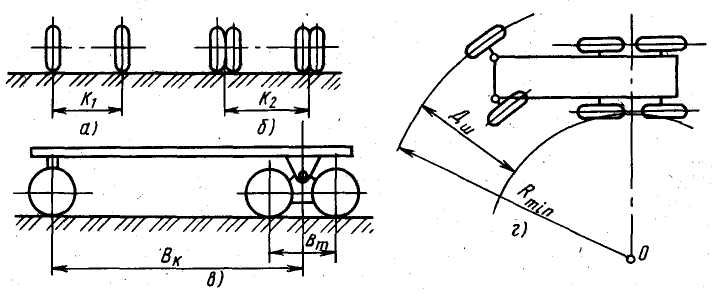 Рис. 6. Параметры, характеризующие маневренность шасси автомобиля 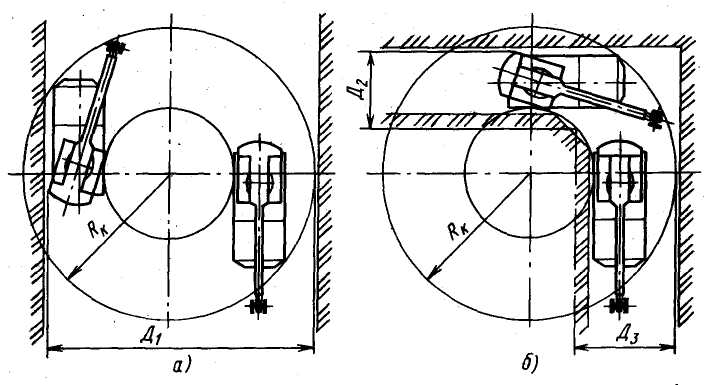 Рис. 7. Параметры, характеризующие маневренность крана Мощность силовой установки N - мощность двигателя внутреннего сгорания, установленного на шасси базового автомобиля. Под базовым автомобилем имеется в виду автомобиль, ходовая часть которого входит в ходовое устройство крана. В характеристике крана мощность двигателей внутреннего сгорания иногда указывают в лошадиных силах (1 л. с. = 0,736 кВт). Для кранов с электрическим приводом в характеристике указывают также мощность каждого из электрических двигателей отдельных механизмов. Для кранов с гидравлическим приводом вместо мощности указывают предельный момент на валу гидравлических моторов. УСТОЙЧИВОСТЬ Автомобильные краны являются свободно стоящими, поэтому устойчивость их против опрокидывания обеспечивается только собственной массой. Кроме массы крана, массы поднимаемого груза и массы грузозахватных приспособлений на кран действуют различные внешние нагрузки: инерционные силы, возникающие в периоды пуск"а или торможения исполнительных механизмов кранов (грузовая и стреловая лебедки, механизмы поворота и передвижения крана, выдвижения и подъема стрелы); ветровая нагрузка, возникающая при давлении ветра на груз и элементы крана; центробежные силы, возникающие при вращении поворотной части крана. Эффект от действия той или иной внешней нагрузки (силы) зависит не только от ее значения, но и от точки ее приложения. Чем дальше действующая сила от ребра опрокидывания, тем больше эффект ее действия. Другими словами, действие нагрузок на кран характеризуется моментом действующей силы, равной произведению этой силы на расстояние от ребра опрокидывания (плечо действия). В свою очередь, плечи действующих сил зависят от угла наклона площадки, на которой стоит кран, положения стрелы и груза. Краны проектируют так, чтобы при любых условиях (как в рабочем, так и нерабочем состоянии) была обеспечена их устойчивость. При определении устойчивости ветровая нагрузка и уклон пути в расчетах рассматриваются как факторы, всегда неблагоприятные для устойчивости крана. Различают грузовую устойчивость, т. е. способность крана при работе противостоять действию всех нагрузок, стремящихся опрокинуть его вперед - в сторону стрелы, и собственную устойчивость, т. е. устойчивость крана в нерабочем состоянии при отсутствии полезных нагрузок и возможном опрокидывании назад - в сторону, противоположную стреле. Грузовую и собственную устойчивость крана проверяют расчетом. Показателем устойчивости крана в рабочем состоянии является коэффициент грузовой устойчивости, в нерабочем - коэффициент собственной устойчивости. Коэффициентом грузовой устойчивости fq называется отношение момента сил относительно ребра опрокидывания, создаваемого массой всех частей крана с учетом всех дополнительных нагрузок и влияния наибольшего допускаемого при работе крана уклона, к моменту сил, создаваемому массой рабочего груза относительно того же ребра. К дополнительным нагрузкам относятся ветровая нагрузка для рабочего состояния (принимается по ГОСТ 1451-77 «Краны подъемные. Нагрузка ветровая») и инерционные силы, возникающие в период пуска или торможения механизма крана (грузовой и стреловой лебедОк, механизмов поворота крана, выдвижения стрелы, передвижения крана). Коэффициент грузовой устойчивости определяют для двух расчетных положений стрелы крана относительно ребра опрокидывания: перпендикулярно ребру опрокидывания; под углом 45° к ребру опрокидывания. При положении стрелы под углом 45° учитывают также дополнительные касательные инерционные силы, возникающие при торможении механизма поворота. Грузовая устойчивость крана считается удовлетворительной, если коэффициент грузовой устойчивости, определенный в соответствии с Правилами устройства и безопасной эксплуатации грузоподъемных кранов, равен или более 1,15. Если коэффициент грузовой устойчивости определяется как отношение момента относительно ребра опрокидывания, создаваемого массой всех частей крана без учета дополнительных нагрузок и уклона пути, к моменту, создаваемому массой рабочего груза относительно того же ребра, то его числовое значение должно быть не менее 1,4. Коэффициентом собственной устойчивости к2 называется отношение момента, создаваемого массой всех частей крана с учетом уклона пути в сторону опрокидывания относительно ребра опрокидывания, к моменту, создаваемому ветровой нагрузкой относительно того же ребра опрокидывания. Ветровая нагрузка принимается по ГОСТ 1451-77 для нерабочего состояния крана. Собственная устойчивость крана считается удовлетворительной, если коэффициент собственной устойчивости в соответствии с Правилами устройства и безопасной эксплуатации грузоподъемных кранов равен или более 1,15. Числовые значения коэффициентов грузовой и собственной устойчивости определяют, принимая угол наклона крана 3°. Машинист автомобильного стрелового крана должен помнить о том, что потеря устойчивости приводит к тяжелым авариям. Поэтому для уменьшения дополнительных опрокидывающих нагрузок все движения, необходимые для управления краном, следует выполнять плавно, а кран устанавливать таким образом, чтобы угол наклона его поворотной части по отношению к горизонтальной плоскости не превышал 1,5°. СКЛАДСКОЕ ОБОРУДОВАНИЕ
Стационарные перегрузочные мосты обеспечивают быструю погрузку и разгрузку в течение нескольких минут. Они перекрывают пространство между грузовым автомобилем и погрузочной рампой и выравнивают различную высоту между платформой автомобиля и погрузочной площадкой. Шлюз-тамбуры в комплектации с мостами и герметизаторами могут быть дополнительно смонтированы перед зданием склада. Они позволяют полностью использовать площадь склада и снизить затраты на строительство. Герметизаторы для ворот защищают грузы и персонал от атмосферных воздействий и сквозняка. Они экономят расходы на энергию и разработаны для различных требований в виде тентовых герметизаторов, надувных герметизаторов или герметизаторов с подушками. Оборудование для межэтажного перемещения грузов Подвесные конвейеры Подвесные конвейеры (рис. 1) состоят из одинарной линии замкнутого тягового элемента, замкнутого подвесного рельсового пути, приводного и натяжных устройств. Их применяют для непрерывного и периодического перемещения штучных грузов по сложной пространственной траектории, состоящей из горизонтальных, вертикальных и наклонных участков. К кареткам 6, прикрепленным к тяговому элементу, присоединены подвески 9, на которые укладывают груз. Каретки (рис. 105, а) состоят из катков /, кронштейна 2 и вилки 3. Они движутся по подвесному пути 5 (см. рис. 104), изготовленному из двутавра, уголка или полосовой стали. Загрузка и разгрузка конвейера производится на ходу, вручную или автоматически. Пространственная трасса является главным преимуществом подвесного конвейера. В процессе транспортирования на подвесном конвейере изделия часто проходят различные технологические операции: очистку, сушку, окраску и др. В качестве тягового элемента в конвейерах используют цепь или канат (см. рис. 105). Большое распространение получили разборные тяговые цепи [ГОСТ 589—85 (СТ СЭВ 535—77)1. В этих цепях звено может поворачиваться в двух плоскостях. Их широко используют в подвесных грузоведущих конвейерах о пространственными трассами и в скребковых конвейерах. 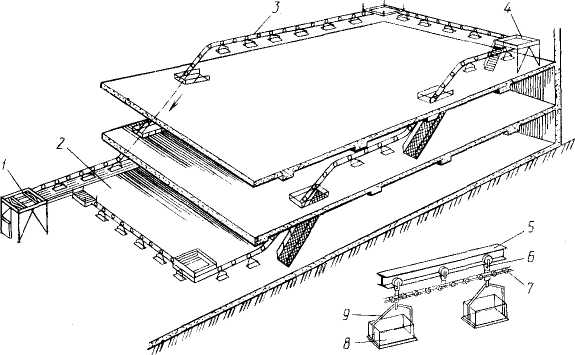 ¶Рис. 1. Схема подвесного конвейера: 1 •— натяжное устройство; 2 — участок загрузки; 3 — участок разгрузки; 4 —• приводное устройство; S— путь для кареток; в — каретка; 7 »=• цепь; 8 — груз; 9 -<• подвеска ТРАНСПОРТИРУЮЩИЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ С ТЯГОВЫМ ЭЛЕМЕНТОМ Транспортирующие машины непрерывно!! действия с тяговым элементом широко используют в современном производстве для межцехового и внутрицехового перемещения сыпучих, кусковых и штучных грузов. По типу тягового элемента их делят на ленточные и цепные конвейеры. Если в ленточных конвейерах тяговое усилие от двигателя транспортируемому грузу передается через ленту, на которой он и транспортируется, то в цепных конвейерах груз транспортируется на пластинах, в ковшах и других устройствах, прикрепленных к цепи. Поэтому и название конвейеров связано с этими устройствами: пластинчатые, ковшовые и др. Наряду с постоянным расширением области применения всех машин непрерывного действия с тяговым элементом при механизации и автоматизации производства характерной тенденцией современного развития машин непрерывного действия является особенно широкое применение ленточных конвейеров в СССР и за рубежом с увеличением их производительности, длины, мощности привода, ширины и прочности ленты. Например, на открытых горных разработках применяют конвейеры производительностью до 30 000 т/ч, с лентой шириной 3000 мм, скоростью 6 ... 8 м/с и длиной става одного конвейера 8 ... 10 км. Это дает возможность избавиться от автомобильного и железнодорожного транспорта, например для подачи руды с места разработки прямо на обогатительную фабрику. Создание мощных высокопроизводительных ленточных конвейеров, обладающих высокими технико-экономическими показателями, возможно только на базе глубоких теоретических разработок и уточненных методов расчета основных параметров и элементов конструкции. РАЗНОВИДНОСТИ ТРАНСПОРТИРУЮЩИХ МАШИН Основными разновидностями транспортирующих машин непрерывного действия с тяговым элементом являются ленточные и цепные конвейеры для горизонтального или наклонного транспортирования груза, а также элеваторы для транспортирования груза в вертикальном или крутонаклонном направлении. ¶ниром, ось которого расположена перпендикулярно к осям шарниров цепи. Такое соединение цепи с кареткой допускает взаимный поворот секции цепи между каретками люлек на угол до 45° и уменьшение радиусов перегиба до 1 ... 1,5 м. При незначительных скоростях движения используют круглозвенные грузовые и тяговые цепи [ГОСТ 2319—81 (СТ СЭВ 2639—80)] (см. рис. 105, б). При небольших нагрузках (50 ... 100 кг) и больших перегибах в горизонтальных и вертикальных плоскостях используют двух-шарнирные цепи (см. рис. 105, д) Львовского конвейерного завода (ТУ 24-9-391—75) с шагом р = 200 мм. Наибольшее распространение получили грузотолкающие подвесные конвейеры. В этом конвейере (см. рис. 105, г) тележка 7 с подвесками для грузов движется по дополнительным путям 8, получая движение от толкателей 6, соединенных с цепью 9. Цепь находится над рельсом 8, удерживаясь от провисания ползунами 5, скользящими по полкам направляющих уголков 4. Тележки толкающего подвесного конвейера можно вывести с трассы конвейера на рельсовые пути, являющиеся ответвлениями основного пути. Это свойство легкого и удобного вывода тележек с грузом с трассы конвейера и включения их в конвейерный ход является основным преимуществом толкающих конвейеров. Конструкция и расстановка тележек на тяговом элементе определяются характером груза и его размером, а также требованиями технологического процесса. Длина трассы подвесного конвейера может достигать 500 м и более. Толкающие конвейеры могут быть напольными. В этом случае цепь конвейера находится под полом цеха, а к толкателям, проходящим в щелях, подсоединяют тележки, которые движутся по полу цеха. В подвесных конвейерах широкое применение находит автоматическое адресование транспортируемого груза, т. е. отправка груза на заданное рабочее место. Автоматическое адресование выполняется с помощью электрических или электромеханических устройств. Автоматическое адресование значительно уменьшает число рабочих, занятых на транспортировании, и ускоряет процесс доставки груза к месту назначения. Наиболее часто автоматическое адресование используют при применении подвесных цепных конвейеров толкающего типа. Применяют две принципиально различные схемы адресования. В первой схеме сигнал на перевод стрелки подается с центрального пульта с помощью устройства. В этом случае тележка или каретка с люлькой, выходящая на приводной участок пути, при прохождении контрольного пункта отмечается, и при дальнейшем ее движении в соответствии с заданной программой следующее устройство готовит путь для этой тележки. Сама тележка не несет при этом на себе никаких адресующих устройств. Во второй схеме маршрут следования тележки закладывается в закодированном виде в адресующее устройство, смонтированное на тележке. В этом случае тележка сама подготавливает себе путь, на сложных трассах возможно совмещение обеих схем адресования. Адресная система грузонесущего конвейера состоит из ядре-соносителя, настройщика адреса, считывающего устройства, определителя адреса и датчика каретки, определяющего ее местонахождение. Адресоноситель устанавливают на ходовой части конвейера ка каретках или подвесках. Все остальные элементы адресной системы располагают вдоль трассы конвейера. Существуют механические и пневмоэлектрические адресователи, но прогрессивнее системы с бесконтактным способом считывания (фотоэлектрические, индукционные, емкостные и др.), поскольку в них не происходит изнашивания адресующих элементов. Систему автоматического адресования легко объединить с автоматическим устройством подсчета числа т лежек — результаты учета документально оформляются печатающими устройствами. Производительность подвесного конвейера определяют так же, как для конвейеров штучных грузов. Производительность или число штучных грузов (шт/ч), перемещаемых подвесным конвейером в час, Q= 3600wz/p, где у — скорость тягового элемента конвейера, м/с; z— число изделий, помещаемых на подвеске кышейера, шт., р — шаг п ид песок (расстояние между подвесками), м. Скорость движения (0,05 ... 0,5 м/с) устанавливают в зависимости от массы груза, производительности конвейера и способов загрузки и выгрузки грузов. У технологических конвейеров скорость определяется требованиями производства. Тяговый расчет подвесного конвейера аналогичен тяговым расчетам других видов цепных конвейеров. Минимальное натяжение в тяговом элементе подвесного конвейера 0,5 ... 1 кН. Тяговый элемент выбирают по максимальному расчетному натяжению, которое определяют о помощью обхода контура по точкам. ЭЛЕВАТОРЫ Конвейер для транспортирования грузов в ковшах, жестко прикрепленных к тяговому элементу, в вертикальной или крутонаклонной плоскости называют элеватором (рис. 106, 107). ¶Тяговым элементом / может служить лента (рис. 106, а) (ГОСТ 23831—79*), пластинчато-втулочные и втулочно-роликовые цепи (рис. 106, б, в) [ГОСТ 588—81* (СТ СЭВ 1011—78)]. При ширине ковшей до 250 мм допустимо применять одну тяговую цепь для элеватора. Тяговый элемент огибает приводной 3 и натяжной 4 барабаны или звездочки, укрепленные в крайних точках элеватора. В вертикальных элеваторах небольшой высоты между крайними точками опор для тягового элемента обычно не делают. В наклонных и высоких вертикальных элеваторах лента опирается на направляющие ролики, а цепь катится роликами по направляющим (рис. 106, г) или опирается, как и лента, на направляющие ролики (рис. 106, д). Элеватор целиком защищен металлическим кожухом 5 с окнами для осмотра. Наклонные элеваторы могут быть открытыми (без кожуха). При движении тягового элемента ковши 2 зачерпывают груз (материал) и транспортируют его вверх, где под действием силы тяжести и инерции материал высыпается из ковша и поступает в разгрузочное отверстие. Широкому распространению элеваторов способствуют простота конструкции, малые размеры, возможность подачи груза по вертикали (до 70 м), большая производительность (до 70 м3/ч). К недостаткам элеваторов относят чувствительность к перегрузкам и необходимость равномерной подачи материалов. Ковш имеет следующие основные параметры: угол а черпания; угол р верхней кромки; ширину Вк; вылет / и глубину h(табл. 13). Нижнюю часть элеватора называют башмаком. Он состоит из кожуха, загрузочного бункера и натяжного устройства (звездочки, вала с подшипниками и винтового или грузового натяжного приспособления). Натяжное устройство перемещает в направляющих пазах звездочки или барабан. Перемещение натяжного устройства составляет 1,6 шага цепи, а для ленточных тяговых элементов 1 ... 3 % высоты элеватора. 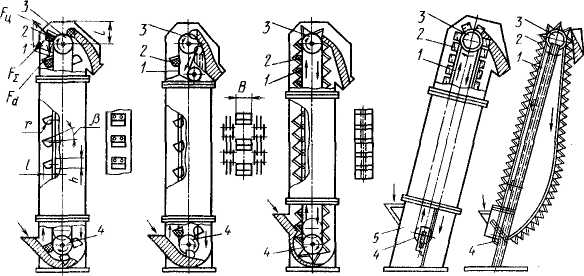 Рис. 106. Схеми элеваторов для насыпным грузов 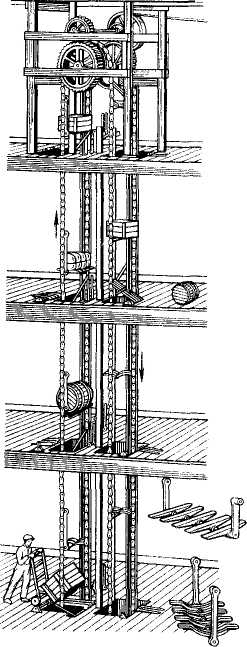 Верхнюю часть элеватора называют головкой элеватора. Состоит она из кожуха, приводных звездочек или барабана, редуктора с двигателем и останова (или тормоза) для предотвращения обратного хода элеватора. В башмаке ковши могут загружаться зачерпыванием груза из нижней части кожуха элеватора (см. рис. 106, а и б) или засыпанием груза непосредственно в ковши (см. рис. 106, в). На практике обычно имеют место одновременно оба способа при преимущественном преобладании одного из них. Наполнение ковшей зачерпыванием применяют при транспортировании пылевидных малоабразивных грузов (цемента, песка и др.), черпание которых не вызывает значительных сопротивлений. Зачерпывание такого груза может происходить при повышенной скорости движения ковшей (0,8 ... 8 м/с). Крупнокусковые и абразивные грузы (гравий, руда, уголь и т. д.) зачерпывать ковшом со дна кожуха затруднительно, так как вследствие больших сопротивлений при черпании возможен отрыв ковшей и даже Рис. 107. Схема элеватора для обрыв тягового элемента. Поэтому штучных грузов при крупнокусковых и абразивных грузах наполнение ковшей производится непосредственно засыпанием груза в ковш. Применение этого способа возможно только при непрерывном, сомкнутом расположении ковшей и пониженных скоростях движения ковшей (не более 1 м/с), так как при большой скорости ковши плохо заполняются и отбрасывают груз. Разгрузка ковшей бывает центробежная (скорость более 1 м/с) и самотечная свободная через внутреннюю кромку ковша под действием силы тяжести (гравитационной) при пониженной скорости движения ковшей (скорость менее 0,6 ... 0,8 м/с). На восходящей ветви вертикального элеватора груз в ковше движется прямолинейно и равномерно. Он находится только под действием силы тяжести FR = mg, где т — масса груза в ковше; g— ускорение свободного падения. Когда ковш огибает барабан (вращающийся с частотой пб), начинает действовать ¶13. Параметры ковша Размеры ковша, мм Вылет I Высота Ь Ширина В Радиуо г днища 100 125 160 200 250 320 400 500 Г  -скругленный глубокий о расставленным шагом -скругленный глубокий о расставленным шагом
|


