Учебное пособие санктпетербург 2016 удк 681. 5 (075. 8) Ббк 22. 161я73 к 59 Рецензенты
 Скачать 1.97 Mb. Скачать 1.97 Mb.
|

 Рис. 4.15. Графическое определение  4.4. Синтез последовательных корректирующих устройств в системах подчиненного регулирования Системой подчиненного управления (СПУ) называется система автоматического управления, состоящая из нескольких вложенных друг в друга замкнутых контуров, настроенных так, что внутренний контур подчиняется внешнему контуру, который вырабатывает сигнал управления для внутреннего контура и управляет им. Классическая структура СПУ показана на рис. 4.16. Она включает в себя три контура, каждый из которых содержит свой собственный регулятор  , , , , и датчик регулируемой величины и датчик регулируемой величины  , , , , соответственно. соответственно.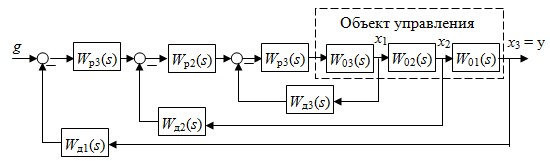 Рис. 4.16. Классическая структура СПО Таким образом, основными принципами построения СПУ являются: декомпозиция объекта управления на несколько на три управляемых частей с контролем и управлением выходной величины каждой части; последовательная коррекция свойств каждого контура с помощью включаемых в начало прямого канала каждого контура регуляторов; основным назначением регулятора является компенсация основных инерционностей контура; подчиненность внутренних контуров внешним. Структура и параметры последовательных корректирующих устройств (регуляторов) выбираются исходя из определенных критериев. Сам процесс выбора структуры и параметров регулятора в контуре системы подчиненного управления получил название способа настройки контура. В настоящее время для настройки контуров СПУ используются, главным образом, два основных способа настройки: настройка на “оптимум по модулю” (ОМ); настройка на “симметричный оптимум” (СО). 4.4.1. Настройка на оптимум по модулю Настройка контура на ОМ обеспечивает характеристики, замкнутого контура, подобные характеристикам устойчивого колебательного звена второго порядка с коэффициентом демпфирования = 0.707 и быстродействием, определяемым суммарной малой постоянной времени контура. Передаточная функция замкнутого контура, настроенного на ОМ  , ,где  – коэффициент передачи датчика обратной связи контура; – коэффициент передачи датчика обратной связи контура;  – суммарная малая постоянная контура, равная сумме малых постоянных времени части объекта управления, входящей в контур и датчика обратной связи. – суммарная малая постоянная контура, равная сумме малых постоянных времени части объекта управления, входящей в контур и датчика обратной связи.Передаточная функция разомкнутого контура, настроенного на ОМ  соответствует системе с астатизмом первого порядка. ЛАФЧХ разомкнутого и замкнутого контуров представлены на рис. 4.17. соответствует системе с астатизмом первого порядка. ЛАФЧХ разомкнутого и замкнутого контуров представлены на рис. 4.17.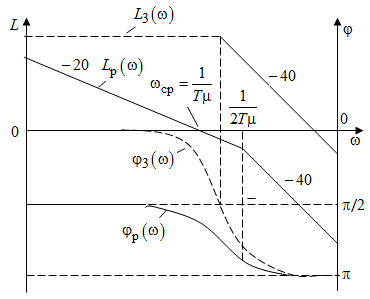 Рис. 4.17. ЛАФЧХ разомкнутого и замкнутого контуров П 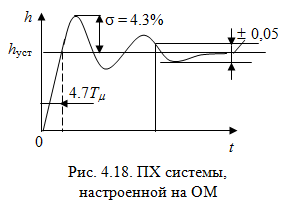 ереходная характеристика контура, настроенного на ОМ, будет иметь вид, показанный на рис. 4.18. ереходная характеристика контура, настроенного на ОМ, будет иметь вид, показанный на рис. 4.18.Она характеризуется перерегулированием = 4.3% и временем первого согласования  . .Рассмотрим, какими должны быть тип и параметры регуляторов при настройке на ОМ контуров с различными передаточными функциями объектов управления. Объектом управления в контуре считаются все элементы контура, включая датчик обратной связи, кроме регулятора. 1. Позиционный объект с одной главной инерционностью:  , ,где  – коэффициент передачи объекта (равный произведению коэффициентов всех элементов, входящих в объект); – коэффициент передачи объекта (равный произведению коэффициентов всех элементов, входящих в объект);  – основная постоянная времени объекта, характеризующая главную инерционность объекта. – основная постоянная времени объекта, характеризующая главную инерционность объекта.Желаемая передаточная функция разомкнутого контура при настойке на ОМ:  . .Учитывая, что регулятор включен последовательно с объектом, имеем  Получим передаточную функцию регулятора, реализующего пропорционально-интегральный (ПИ) закон регулирования, у которого коэффициент  , а постоянная времени , а постоянная времени  . .Объект интегрального типа:  . .Передаточная функция регулятора  Из полученного выражения видно, что необходим пропорциональный (П) регулятор с коэффициентом .3. Позиционный объект с двумя преобладающими постоянными времени:  . .Действуя аналогично пп 1 и 2, находим передаточную функцию регулятора:  Необходим регулятор с передаточной функцией  где  ; ;  ; ;  . .Такой регулятор называется пропорциоанльно-интегрально-дифференциальным (ПИД), который имеет три параметра настройки (  , , , , ). ).4.4.2. Настройка на симметричный оптимум Настройка на симметричный оптимум (СО) обеспечивает более быстрые процессы в контуре по сравнению с контуром, настроенным на ОМ. В замкнутом состоянии контур, настроенный на СО, имеет передаточную функцию  . .ЛАЧХ разомкнутого контура будет иметь вид, показанный на рис. 4.19. 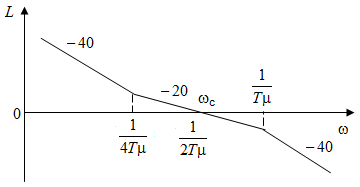 Рис. 4.20. ЛАЧХ разомкнутого контура Эта ЛАЧХ совершенно симметрична относительно оси частот и частоты среза с, поэтому способ настройки, обеспечивающий такую ЛАЧХ, получил название симметричный оптимум, передаточная функция которого равна:  . .П 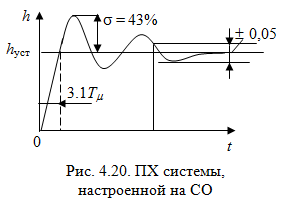 ереходная характеристика контура, настроенного на СО (рис. 4.20) характеризуется временем первого согласования t1 = 3.1T и перерегулированием = 43%. ереходная характеристика контура, настроенного на СО (рис. 4.20) характеризуется временем первого согласования t1 = 3.1T и перерегулированием = 43%.Определим тип и параметры регуляторов при настройке на СО контуров с различными объектами. Объект интегрального типа: .Желаемая передаточная функция  . .Передаточная функция регулятора  Для того чтобы контур был настроен на СО, необходим ПИ- регулятор с передаточной функцией  где ,  . .Из полученного выражения видно, что коэффициент регулятора рассчитывается по такой же формуле, как и при настройке на ОМ, но постоянная времени другая, меньше чем  . .Объект позиционный с одной преобладающей постоянной времени:  . .Для определения типа и параметров регулятора построим ЛАЧХ системы и регулятора (рис. 4.21). 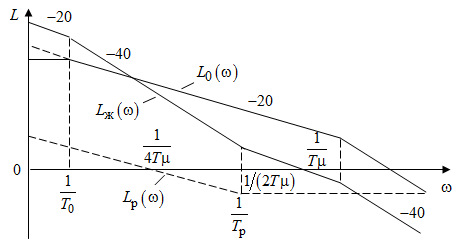 Рис. 4.21. ЛАЧХ системы и регулятора Из рис. 4.21 следует, что необходим ПИ-регулятор с передаточной функцией где , . Но желаемая характеристика   на частоте на частоте  претерпевает излом и теряет свойства характеристики системы с астатизмом второго порядка. Переходный процесс при претерпевает излом и теряет свойства характеристики системы с астатизмом второго порядка. Переходный процесс при  близок к стандартному для настройки на ОМ. близок к стандартному для настройки на ОМ.Вопросы для самопроверки 1. Каким образом экспериментальным путем можно оценить качество работы системы? 2. Какова роль моделирования систем управления? 3. Перечислите общие методы повышения точности систем управления. Поясните их. 4. Дайте понятие астатических системы управления. Каким образом определяется степень астатизма? 5. В чем преимущество повышения степени астатизма системы с помощью изодромных устройств? 6. Какая система является инвариантной по отношению к внешним воздействиям? 7. Что понимается под комбинированным управлением? 8. Как определяются передаточные функции компенсирующих устройств в комбинированных системах? 9. Для каких целей используются неединичные главные обратные связи? 10. Сформулируйте понятие чувствительности систем управления. 11. Каким образом можно получить уравнения чувствительности? 12. Что представляют собой функции чувствительности и коэффициенты чувствительности? СПИСОК ЛИТЕРАТУРЫ 1. Козлова, Л.П. Теория автоматического управления. ч. 1: учебно-методический комплекс [Текст] / Л.П. Козлова, О.И. Золотов – СПб.: Изд-во СЗТУ, 2009. – 252 с. 2. Теория автоматического управления [Текст] : учебник для вузов / С. Е. Душин [и др.] ; ред. В. Б. Яковлев ; рец.: В. В. Григорьев, Г. А. Дидук. - М. : Высш. шк., 2003. - 562 с. Козлова Людмила Петровна Козлова Ольга Александровна Золотов Олег Иванович ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ Учебное пособие Редактор _________________ Компьютерная верстка _______________ План 2016 г, п. Подписано к печати .2016 Объем 6,0 усл.-печ. л. Тираж 30 экз. Заказ _____ РИЦ СПбГУТ. 191186 СПб., наб. р. Мойки, 61 О тпечатано в СПбГУТ Л. П. Козлова, О.А. Козлова, О.И. Золотов ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ УЧЕБНОЕ ПОСОБИЕ САНКТ-ПЕТЕРБУРГ 2 016 |