Курсовая работа. Высшего профессионального образования мичуринский государственный аграрный университет
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

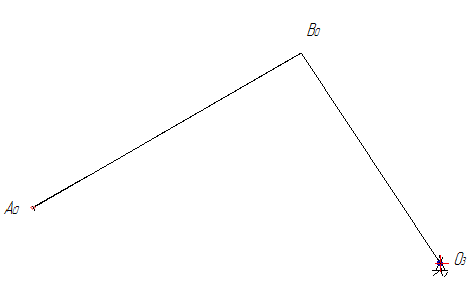
ВВЕДЕНИЕКурс теории механизмов и машин рассматривает общие методы исследования и проектирования и является общетехнической дисциплиной, формирует знание инженеров по конструированию, изготовлению и эксплуатации машин. Общие методы синтеза механизмов позволяют будущему инженеру определять многие параметры проектируемых механизмов и машин. Курс теории механизмов и машин является основой для изучения последующих дисциплин. Курсовое проектирование по теории механизмов и машин является самостоятельной творческой работой студента. В процессе разработки курсового проекта студент решает ряд расчётно-графических задач, с решением которых инженеру-конструктору приходится встречаться на современном производстве. Цель курсового проекта - развить у студента навыки самостоятельного решения комплексных инженерных задач, приобретение навыков оформления конструкторской документации в соответствии с требованиями ЕСКД. Объектом исследования является мембранный насос. 1 Синтез, структурное и кинематическое исследование рычажного механизма1.1 Проектирование механизмаНа рис.2 изображены два крайних положения механизма. Угол перекрытия на этом рисунке определяется по формуле θ=180 Длину кривошипа находим из выражения Длину коромысла находим из выражения 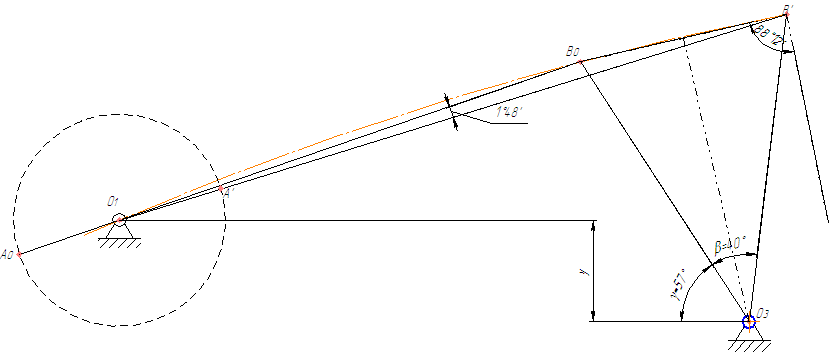 Рис.2 - Проектирование механизма 1.2 Структурное исследование рычажного механизмаРассматриваемый в данном проекте рычажный механизм состоит из стойки 0, кривошипа 1, шатуна 2, коромысла 3 (рис. 1). Перечислим все одноподвижные пары: - кривошип 1 образует вращательную пару со стойкой и шатуном 2; - коромысло 3 входит во вращательную пару шатуном 2 и стойкой 0. Таблица 2 – Кинематические пары
Таким образом, число подвижных звеньев n = 3; число одноподвижных пар p1 = 4. Кинематическая цепь механизма плоская, сложная, замкнутая. Число степеней подвижности определяем по формуле Чебышева [2]:
Исследуемый механизм имеет одну обобщенную координату: угол поворота начального звена
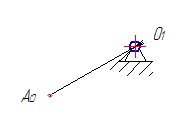
Для установления класса механизма, определим наивысший класс группы Аcсура, входящей в его состав. Отделение структурных групп начинаем с группы, наиболее удаленной от начального звена. В заданном механизме наиболее отдалена от начального звена группа второго класса второго вида со звеньями 2 и 3 (ВВП) (рисунок 2, а). В результате остается механизм первого класса, в состав которого входит начальное звено 1 и стойка 0 (рисунок 2, б). Механизм образован последовательным присоединением к начальному звену структурной группы второго класса. Поэтому по классификации Ассура-Артоболевского, его следует отнести ко второму классу. Формула строения рассматриваемого механизма имеет вид: I(1) II(2,3) | |||||||||||||||||||||||||