Ответы. Задача по теме Работа. Мощность. Ответы
 Скачать 1.58 Mb. Скачать 1.58 Mb.
|

|
БИЛЕТ №1. 1)Материальная точка и способы описание её движения. 2)Момент инерции тонкого кольца относительно оси симметрии. 3)Задача по теме «Работа. Мощность». Ответы: 1) Кинематика – раздел механики, изучающий способы описания движений и связь между величинами, характеризующие эти движения. Материальная точка - тело, размерами которого в данной задачи можно пренебречь. Механическое движение тела - изменение положения этого тела в пространстве относительно других тел с течением времени. Механическое движение относительно. Движение одного и того же тела относительно разных тел оказывается различным. Описать движение тела – это значит указать способ определения его положения в пространстве в любой момент времени. В кинематике существует три способа описания движения материальной точки в пространстве. Рассмотрим их: 1. Векторный способ: В этом случае положение материальной точки задается с помощью радиус вектора, представляющий собой вектор, проведенный из точки О, соответствующей началу отсчета, в интересующую нас точку. В процессе движения материальной точки её радиус-вектор может меняться по модулю и направлению траектории точки. 2. Координатный способ. В этом случае положение материально точки на плоскости в произвольный момент времени определяется координатами X и Y, которые представляют собой проекции радиус вектора тела на оси. При движении тела координаты его изменяются во времени, являясь функциями (T): X(T) = X, Y(T) = Y, если эти функции известны, то они определяют положение тела в любой момент времени. Зная эти зависимости, можно найти положение тела, проекции на его скорость, модуль и направление a и V в любой момент времени.  3. Естественный способ. Применяется, если траектория материальной точки известна заранее. На заданной траектории выбирают начало отсчёта - неподвижную точку, а положение материальной точки определяют при помощи дуговой координаты, представляющей собой расстояние вдоль траектории от выбранного начала отсчета до самой материальной точки. Движение тела считается определённым, если известны его траектория, начало отсчета, положительное направление дуговой координаты и зависимость времени от этой координаты. Перемещение тела – вектор, соединяющий начальное и конечное положение тела. Средняя скорость – отношение перемещения тела к времени. Средняя путевая скорость – отношение пути к времени, за которое был пройден этот путь. Мгновенная скорость – величина, к которой стремится отношение при стремление ∆t к нулю. Вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела. В системе СИ длина измеряется в метрах (м), ускорение – метр на секунду в квадрате, скорость – метр на секунду (м\с), время – в секундах (с). 2) 1. Момент инерции тонкого кольца относительно оси, проходящей через его центр перпендикулярно его плоскости (или тонкостенного полого цилиндра относительно его оси симметрии): I = mR2. Момент инерции Для вычисления момента инерции мы должны мысленно расчленить тело на достаточно малые элементы, точки которых можно считать лежащими на одинаковом расстоянии от оси вращения, затем найти произведение массы каждого элемента на квадрат его расстояния от оси и, наконец, просуммировать все полученные произведения. Очевидно, это весьма трудоемкая задача. Для подсчета моментов инерции тел правильной геометрической формы можно воспользоваться в ряде случаев приемами интегрального исчисления. Нахождение конечной суммы моментов инерции элементов тела заменим суммированием бесконечно большого числа моментов инерции, вычисленных для бесконечно малых элементов: limi = 1∞ΣΔmiri2 = ∫r2dm. (при Δm → 0). Вычислим момент инерции однородного диска или сплошного цилиндра высотой h относительно его оси симметрии Расчленим диск на элементы в виде тонких концентрических колец с центрами на оси его симметрии. Полученные кольца имеют внутренний диаметр r и внешний r + dr, а высоту h. Так как dr << r, то можем считать, что расстояние всех точек кольца от оси равно r. Для каждого отдельно взятого кольца момент инерции i = ΣΔmr2 = r2ΣΔm, где ΣΔm − масса всего кольца. Объем кольца 2πrhdr. Если плотность материала диска ρ, то масса кольца ρ2πrhdr. Момент инерции кольца i = 2πρhr3dr. Чтобы подсчитать момент инерции всего диска, надо просуммировать моменты инерции колец от центра диска ( r = 0) до края его (r = R), т. е. вычислить интеграл: I = 2πρh 0R∫r3dr, или I = (1/2)πρhR4. Но масса диска m = ρπhR2, следовательно,I = (1/2)mR2. Приведем (без вычисления) моменты инерции для некоторых тел правильной геометрической формы, выполненных из однородных материалов. БИЛЕТ №2. 1)Кинематика прямолинейного движения. Графическая интерпретация. Основные уравнение кинематики. Координата, скорость, ускорения. Для разных типов показать график. Ось перемещение, проэкция перемещения. 2)Момент инерции тонкого стержня. 3)Задача по теме колебания. Ответы: 1)Кинематика-определение положения тела в пространстве в данный момент времени по известным начальным условиям выбранным в СО. Прямолинейное равномерное движение это такое движение при котором за равные промежутки времени тело совершает одинаковые перемещение таким образом что отношение перемещение остаётся величиной постоянной и называется скоростью ПРД.V=S/T. Движение материальной точки всегда рассматривается относительно какого-либо тела, которое в даннойзадаче принимается за неподвижное и называется телом отсчета. С ним связывается система координат; вместе с телом отсчета они образуют систему отсчета. Для прямолинейного движения достаточно выбрать одну ось координат, например ОХ. Тогда положение точки будет определяться его координатой х. Уравнение равномерного движения в скалярной форме будет выглядеть так: где x0 — координата точки в момент времени t = 0. Основное ур-е: x2= x1+ v1*t+a*t^2/2 - где х1 и х2 нач и конечная точки, в1 нач скорость, Т - время, А- ускорение. Основные характеристики движения материальной точки: траектория движения, перемещение точки, пройденный ею путь, координаты, скорость и ускорение. график зависимости проекции скорости от времени. 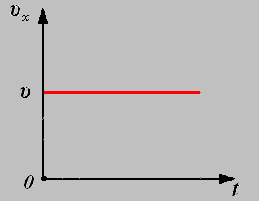 график зависимости проекции скорости от времени. 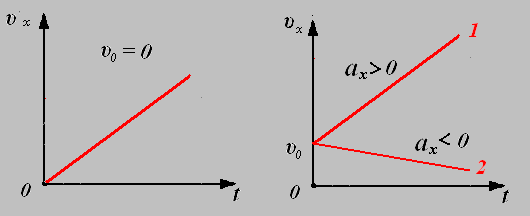 2)Тонкий стержень длины л, препендикулярно проходящей через его середину ml2/12. Для вычисления момента инерции мы должны мысленно расчленить тело на достаточно малые элементы, точки которых можно считать лежащими на одинаковом расстоянии от оси вращения, затем найти произведение массы каждого элемента на квадрат его расстояния от оси и, наконец, просуммировать все полученные произведения. Билет№3. 1)Кинематика криволинейного движения. Характеристики. Нормальное тангенциальное ускорение. 2)Момент инерции сплошного шара, радиусом R, и массой м и оси проходящий через центр масс шара. 3)Задачка на тема энергия. Ответы: 1) Криволинейное движение Криволинейные движения – движения, траектории которых представляют собой не прямые, а кривые линии. По криволинейным траекториям движутся планеты, воды рек. Криволинейное движение – это всегда движение с ускорением, даже если по модулю скорость постоянна. Криволинейное движение с постоянным ускорением всегда происходит в той плоскости, в которой находятся векторы ускорения и начальные скорости точки. В случае криволинейного движения с постоянным ускорением в плоскости xOy проекции vxи vy ее скорости на оси Ox и Oy и координаты x и y точки в любой момент времени t определяется по формулам Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением гдеr – радиус окружности. Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости. При криволинейном движении ускорение можно представить как сумму нормальной и тангенциальной составляющих: , - нормальное (центростремительное) ускорение, направлено к центру кривизны траектории и характеризует изменение скорости по направлению: v – мгновенное значение скорости, r – радиус кривизна траектории в данной точке. - тангенциальное (касательное) ускорение, направлено по касательной к траектории и характеризует изменение скорости по модулю. Полное ускорение, с которым движется материальная точка, равно: . Кроме центростремительного ускорения, важнейшими характеристиками равномерного движения по окружности являются период и частота обращения. П 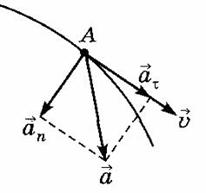 ериод обращения— это время, за которое тело совершается один оборот. ериод обращения— это время, за которое тело совершается один оборот.Обозначается период буквой Т (с) и определяется по формуле: где t — время обращения, п — число оборотов, совершенных за это время. Частота обращения— это величина, численно равная числу оборотов, совершенных за единицу времени. Обозначается частота греческой буквой (ню) и находится по формуле: Измеряется частота в 1/с. Период и частота — величины взаимно обратные: Если тело, двигаясь по окружности со скоростью v, делает один оборот, то пройденный этим телом путь можно найти, умножив скорость v на время одного оборота: l = vT. С другой стороны, этот путь равен длине окружности 2πr. Поэтому vT = 2πr, где w (с-1) - угловая скорость. При неизменной частоте обращения центростремительное ускорение прямо пропорционально расстоянию от движущейся частицы до центра вращения. Угловая скорость (w) – величина, равная отношению угла поворота радиуса, на котором находится вращающаяся точка, к промежутку времени, за который произошел этот поворот: . Связь между линейной и угловой скоростями: v= wr. Движение тела можно считать известным лишь тогда, когда известно, как движется каждая его точка. Самое простое движение твердых тел – поступательное. Поступательным называется движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается параллельно самой себе. 2) Чтобы найти момент инерции тела, надо просуммировать момент инерции всех материальных точек, составляющих данное тело . Билет№4. 1)Кинематика твёрдого тела. Число степеней свободы. Связь. Абсолютное твёрдое тело. 2)Момент инерции полого шара, относительно оси проходящий через его центр масс, масса шара м, внутренний радиус r, внешний R. 3)___ Ответы: 1) Основные понятия, определения и задачи кинематики твердого тела. В кинематике твердого тела изучается движение тел, которые по условию задачи можно принять за твердое тело. К основным задачам кинематики твердого тела относятся определение положения всех точек тела в системе отсчета и нахождение их скоростей и ускорений. Число степеней свободы твердого тела. Числом степеней свободы твердого тела является число независимых между собой параметров, которые определяют положение всех точек тела в системе отсчета. Поясним это понятие, определяя число степеней свободы свободного твердого тела. Вспомним, что свободным твердым телом называется тело, движение которого в пространстве ничем не ограничено. На рис. 69 изображены свободное твердое тело в системе отсчета Oxyz и его кинематическая модель ΔABC . Положение трех точек A, B, C, и следовательно, всех точек твердого тела, определяется девятью их координатами. Но эти координаты связаны между собой тремя уравнениями: 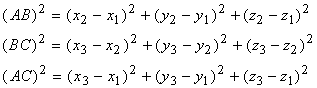 Т 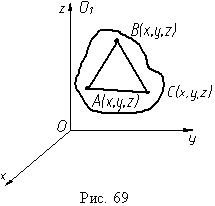 о есть независимыми будут только шесть параметров, которые можно выбирать произвольно, а остальные три параметра определяются из трех последних уравнений. Следовательно, свободное твердое тело имеет шесть степеней свободы. о есть независимыми будут только шесть параметров, которые можно выбирать произвольно, а остальные три параметра определяются из трех последних уравнений. Следовательно, свободное твердое тело имеет шесть степеней свободы. 2) Для вычисления момента инерции мы должны мысленно расчленить тело на достаточно малые элементы, точки которых можно считать лежащими на одинаковом расстоянии от оси вращения, затем найти произведение массы каждого элемента на квадрат его расстояния от оси и, наконец, просуммировать все полученные произведения. Чтобы найти момент инерции тела, надо просуммировать момент инерции всех материальных точек, составляющих данное_тело БИЛЕТ№5. 1)Движение твёрдого тела, закреплённой точкой. Теорема Эйлера. Мгновенная ось вращения. Кинематические уравнение Эйлера. 2)Динамика специальной теории относительности. 3)Задача энергия колебательного движения. Ответы: 1) Движение твердого тела с одной неподвижной точкой. П Д 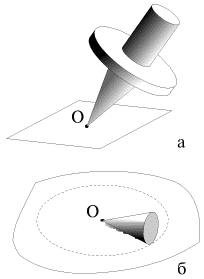 ля твердого уела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некоторый угол вокруг неподвижной оси, проходящей через точку закрепления. Для нас важно следствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Естественно, что положение этой оси как в пространстве, так и относительно самого тела с течением времени в общем случае меняется. МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ ля твердого уела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некоторый угол вокруг неподвижной оси, проходящей через точку закрепления. Для нас важно следствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Естественно, что положение этой оси как в пространстве, так и относительно самого тела с течением времени в общем случае меняется. МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯпрямая, неподвижная в данный момент в нек-рой инерциальной системе отсчёта, относительно к-рой сложное движение твёрдого тела в этот момент можно представить как вращат. вокруг этой прямой. М. о. в. может лежать как внутри тела, так и вне его. С течением времени положение М. о. в. изменяется относительно как неподвижной системы отсчёта, так и системы отсчёта, движущейся вместе с телом. Уравнение Эйлера 1) в механике — динамич. и кинематич. ур-ния, используемые в механике при изучении движения тв. тела; даны Л. Эйлером (L. Euler; 1765). Динамические Э. у. представляют собой дифф. ур-ния движения тв. тела вокруг неподвижной точки и имеют вид: 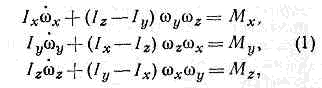 где Ix., Iу, Iz— моменты инерции тела относительно гл. осей инерции, проведённых из неподвижной точки; wх, wу, wz — проекции мгновенной угл. скорости тела на эти оси; Мх, Мy, Mz — гл. моменты сил, действующих на тело, относительно тех же осей; w'х, w'y, w'z — производные по времени от wх, wу, wz. Кинематические Э. у. дают выражения wх, wу, wz через Эйлеровы углы j, y, q и имеют вид: 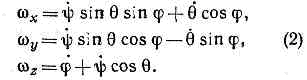 Система ур-ний (1) и (2) позволяет, зная закон движения тела, определить момент действующих на него сил и, наоборот, зная действующие на тело силы, определить закон его движения. 2) Специальная теория относительности (СТО; также частная теория относительности) — теория, описывающая движение, законы механики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света. В рамках специальной теории относительности классическая механика Ньютона является приближением низких скоростей. Обобщение СТО для гравитационных полей называется общей теорией относительности. Описываемые специальной теорией относительности отклонения в протекании физических процессов от предсказаний классической механики называют релятивистскими эффектами, а скорости, при которых такие эффекты становятся существенными, — релятивистскими скоростями. Релятивистская механика — раздел физики, рассматривающий законы механики (законы движения тел и частиц) при скоростях, сравнимых со скоростью света. При скоростях значительно меньших скорости света переходит в классическую (ньютоновскую)механику. Билет№6. 1)Инерциальная система отсчёта. Принцип относительности и преобразования Галилео. 2)Момент инерции сплошного цилиндра, масса м, радиус R. 3)Задача по теме термодинамика. Ответы: 1) Инерциа́льная систе́ма отсчёта (ИСО) — система отсчёта, в которой справедлив закон инерции: все свободные тела (то есть такие, на которые не действуют внешние силы или действие этих сил компенсируется) движутся прямолинейно и равномерно или покоятся[1]. Эквивалентной является следующая формулировка, удобная для использования в теоретической механике[2]: Инерциальной называется система отсчёта, по отношению к которой пространство является однородным и изотропным, а время — однородным. Системы отсчета, для которых выполняется закон инерции, называют инерциальными системами. Опыты Галилея показали, что Земля — инерциальная система отсчета. Но Земля — не единственная такая система. Инерциальных систем отсчета — бесчисленное множество. Например, поезд, идущий с постоянной скоростью по прямому участку пути,— тоже инерциальная система отсчета. Тело получает ускорение относительно поезда также только под действием других тел. Если какая-либо система отсчета движется относительно инерциальной системы поступательно, но не равномерно и прямолинейно, а с ускорением или же вращаясь, то такая система не может быть инерциальной. Действительно, относительно такой системы тело может иметь ускорение даже в отсутствие действия на него других тел. Например, тело, покоящееся относительно Земли, будет иметь ускорение относительно тормозящего поезда или поезда, проходящего закругление пути, хотя никакие тела это ускорение не вызывают. Галилея принцип относительности Галилея принцип относительности принцип физического равноправия инерциальных систем отсчёта (См. Инерциальная система отсчёта) в классической механике, проявляющегося в том, что законы механики во всех таких системах одинаковы. Отсюда следует, что никакими механическими опытами, проводящимися в какой-либо инерциальной системе, нельзя определить, покоится ли данная система или движется равномерно и прямолинейно. Это положение было впервые установлено Г. Галилеем в 1636. Одинаковость законов механики для инерциальных систем Галилей иллюстрировал на примере явлений, происходящих под палубой корабля, покоящегося или движущегося равномерно и прямолинейно (относительно Земли, которую можно с достаточной степенью точности считать инерциальной системой отсчёта): «Заставьте теперь корабль двигаться с любой скоростью и тогда (если только движение будет равномерным и без качки в ту и другую сторону) во всех названных явлениях вы не обнаружите ни малейшего изменения и ни по одному из них не сможете установить, движется ли корабль или стоит неподвижно... Бросая какую-нибудь вещь товарищу, вы не должны будете бросать ее с большей силой, когда он будет находиться на носу, а вы на корме, чем когда ваше взаимное положение будет обратным; капли, как и ранее, будут падать в нижний сосуд, и ни одна не упадет ближе к корме, хотя, пока капля находится в воздухе, корабль пройдет много пядей» («Диалог о двух главнейших системах мира птоломеевой и коперниковой», М. — Л., 1948, с. 147). Движение материальной точки относительно: её положение, скорость, вид траектории зависят от того, по отношению к какой системе отсчёта (телу отсчёта) это движение рассматривается. В то же время законы классической механики (см. Ньютона законы механики), т. е. соотношения, которые связывают величины, описывающие движение материальных точек и взаимодействие между ними, одинаковы во всех инерциальных системах отсчёта. Относительность механического движения и одинаковость (безотносительность) законов механики в разных инерциальных системах отсчёта и составляют содержание Г. п. о. Математически Г. п. о. выражает инвариантность (неизменность) уравнений механики относительно преобразований координат движущихся точек (и времени) при переходе от одной инерциальной системы к другой — преобразований Галилея. Пусть имеются две инерциальные системы отсчёта, одну из которых, Σ, условимся считать покоящейся; вторая система, Σ', движется по отношению к Σ с постоянной скоростьюu так, как показано на рисунке. Тогда преобразования Галилея для координат материальной точки в системах Σ и Σ' будут иметь вид: x' = x - ut, у' = у, z' = z, t' = t (1) (штрихованные величины относятся к системе Σ', нештрихованные — к Σ). Т. о., время в классической механике, как и расстояние между любыми фиксированными точками, считается одинаковым во всех системах отсчёта. Из преобразований Галилея можно получить соотношения между скоростями движения точки и её ускорениями в обеих системах: v' = v - u, (2) a' = a. В классической механике движение материальной точки определяется вторым законом Ньютона: F = ma, (3) где m — масса точки, a F — равнодействующая всех приложенных к ней сил. При этом силы (и массы) являются в классической механике инвариантами, т. е. величинами, не изменяющимися при переходе от одной системы отсчёта к другой. Поэтому при преобразованиях Галилея уравнение (3) не меняется. Это и есть математическое выражение Г. п. о. Г. п. о. справедлив лишь в классической механике, в которой рассматриваются движения со скоростями, много меньшими скорости света. При скоростях, близких к скорости света, движение тел подчиняется законам релятивистской механики Эйнштейна (см.Относительности теория), которые инвариантны по отношению к другим преобразованиям координат и времени — Лоренца преобразованиям (при малых скоростях они переходят в преобразования Галилея). В. И. Григорьев. 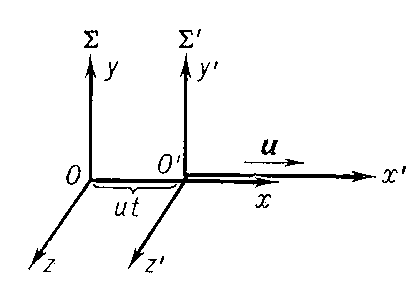 Инерциальная система отсчёта Σ' (с координатными осями x', y', z') движется относительно другой инерциальной системы Σ (с осями х, у, z) в направлении оси х с постоянной скоростью u. Координатные оси выбраны так, что в начальный момент времени (t = 0) соответствующие оси координат совпадают в обеих системах. 2) В случае с толстостенным однородным цилиндром рассмотрим два цилиндра - сплошной и тот, что был вырезан из его полости. Момент первого обозначим 0,5 * M * R^2, а второго 0,5 * m * r^2 Так как момент инерции - величина аддитивная, - то искомый момент равен просто разности этих моментов: 0,5 * ( M * R^2 - m * r^2). Где R и r - внешний и внутренний радиусы толстостенного цилиндра, а M и m - массы сплошного и внутреннего. Остаётся только выразить массу через плотность материала ro и длину цилиндра L. M = ro * V = ro * pi * R^2 * L m = ro * pi * r^2 * L Искомый момент равен: 0,5 * ro * pi * L * (R^4 - r^4) Не знаю точно но может быть: J=(mR^2)/2. |