Настольная Книга Управляющего Складом - Джеймс Томпкинс. 1. Проблемы и задачи складского хранения. Складское хранение и товародвижение
 Скачать 14.49 Mb. Скачать 14.49 Mb.
|

|
Приводы. Приводы элеваторных стеллажей, как правило, размещаются на одном из концов или в обоих концах системы. Верхний привод может быть смонтирован над дорожкой или под ней и заподлицо. Нижний привод смонтирован на полу и имеет панель доступа в задней части ячейки. Двигатели могут работать и от переменного, и от постоянного тока. 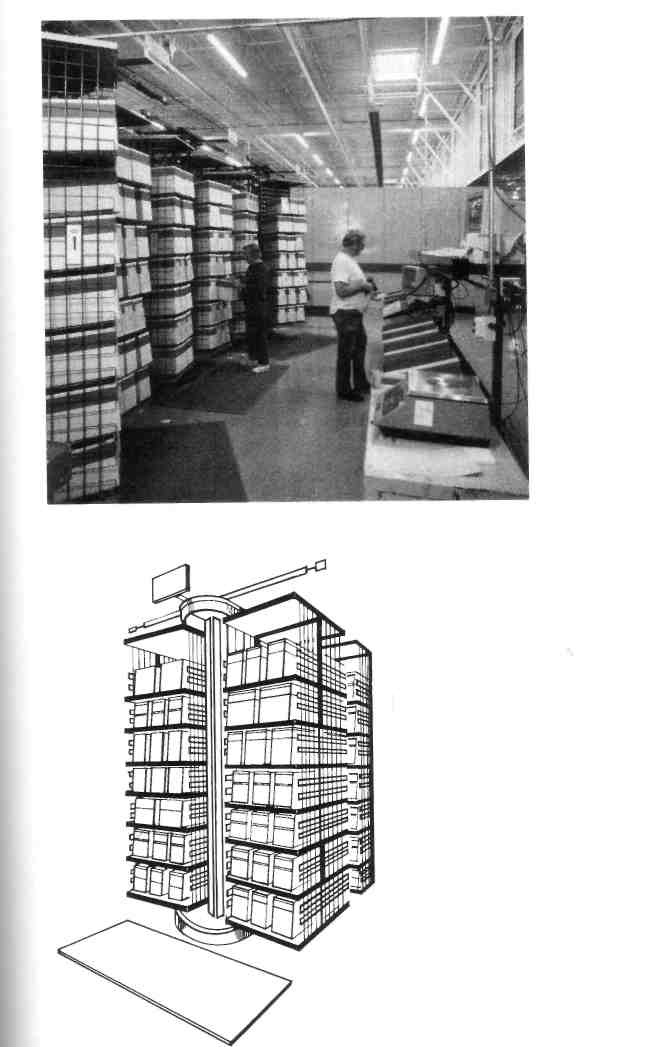 Рис. 20.11 Спаренные ячейки Приводы переменного тока обычно используются для непрерывной работы с легкими весами. Двигателям переменного тока требуется сцепление для защиты привода и уменьшения дергания при запуске. Приводам постоянного тока, которые несколько дороже, чем приводы переменного тока, сцепление не требуется. Они должны использоваться везде, где требуется плавный пуск и остановка, или где нужна точность остановки меньше одного дюйма. Двигатель постоянного тока, так как его контроллер позволяет программировать на месте максимальные скорость, ускорение и замедление, обладает гораздо большей гибкостью. Везде, где требуется изменяемая скорость или роботизированный отбор заказов, должен использоваться привод постоянного тока. Регуляторы и программное обеспечение. Элеваторные стеллажи могут управляться с помощью разнообразных устройств; однако наибольшие преимущества достигаются при компьютерном управлении. В самом базовом, простом варианте, элеваторный стеллаж может управляться с помощью ножного тумблера. Клавиатура позволяет оператору вводить нужный номер ячейки. Микропроцессор выбирает кратчайший путь. Более сложный микропроцессорный регулятор позволяет создавать очередность и сортировать заказы, чтобы уменьшить вращение элеваторного стеллажа. Персональные компьютеры управляют большинством горизонтальных элеваторных стеллажей. Они могут быть отдельными или объединенными в сеть. Заказы обычно загружаются с главной ЭВМ. Программное обеспечение для отбора заказов сохраняет место хранения изделия в памяти и имеет возможность выполнять разнообразные задачи, включая объединение в партии, сортировку по месту хранения, сортировку по очередности, дате или автомобильному маршруту. Программное обеспечение управляет элеваторным стеллажом и световыми подсказками. В то время как оператор отбирает заказы с одного элеваторного стеллажа, другой вращается к нужному месту хранения, сокращая время ожидания. Рабочее место. Рабочее место – это базовая единица в системе элеваторных стеллажей. На типичном рабочем месте будет от двух до четырех элеваторных стеллажей под управлением одного компьютера и одного оператора. Здесь будет и вспомогательное оборудование, такое как световые схемы; световые дисплеи, которые направляют оператора при выполнении задач; сканер штрих-кода; принтер деклараций груза; принтер этикеток штрих-кода; конвейеры для поступающих и отправляемых грузов; стол для отбора заказов; и подъемный стол для высоких элеваторных стеллажей. Рабочее место – это центр отбора заказов в передней части элеваторного стеллажа, но может также включать другое оборудование для хранения, такое как проходные стеллажи и статичные полки с ячейками, когда в заказ могут входить изделия с разными характеристиками, такими как подсчет, размеры или частота событий. Скорость отбора на рабочем месте у элеваторных стеллажей может быть от 200 до 1200 заказов в час, по сравнению с 10 - 30 у статичных полок с ячейками. Структура рабочего места зависит от скорости отбора заказов, количества изделий, других задач, таких как расфасовка по пакетам или взвешивание, уровня товарных запасов и многих других факторов. Последовательность отбора заказов начинается с поступления партии заказов от диспетчера. Когда оператор начинает отбор партии, компьютер вращает ячейки элеваторного стеллажа до первого места хранения из каждой партии. Объединение в партии использует преимущество подобия изделий в каждом заказе, устраняя любое дублирование. Партия сортируется, чтобы отбирать заказы в последовательности ячеек, минимизируя вращение элеваторного стеллажа, позволяя оператору переходить от одного элеваторного стеллажа к другому, чтобы пока он или она отбирает заказы с одного элеваторного стеллажа, другой стеллаж перевозил следующее изделие, уменьшая время ожидания оператора. Срочные заказы могут автоматически проходить через систему без прерывания общего потока. Программное обеспечение прерывает обычные операции на необходимое для срочных заказов время, а затем возобновляет обычные операции. Распределители в форме треугольника и машины для отбора заказов Автоматические машины с исключительно высокой пропускной способностью для отбора заказов из небольших изделий предлагаются в нескольких моделях, обеспечивающих скорость отбора в три-десять раз быстрее, чем у других динамичных систем отбора заказов. Однако, чтобы инвестиции в эти системы были оправданны, обычно требуются специальные типы продукции и варианты отбора. Распределители в форме треугольника и машины для отбора заказов спроектированы для обработки небольших и нехрупких изделий с быстрым оборотом, таких как компакт диски, книги или лекарства. Они обеспечивают пропускную способность до 1500 отборов заказов в час. Наибольшее применение они нашли в оптовой торговле лекарствами, где, в сущности, нет партий ящиками или паллетами, и время оборота короткое. В одной компоновке передвижной отборочный блок автоматически вытаскивает изделия с мест хранения на ленточный конвейер. В другой компоновке, продукция расположена в распределителе в форме треугольника над ленточным конвейером. В каждом накопителе есть механизм, который автоматически выбрасывает изделия на ленточный конвейер. Последовательность выбрасывания осуществляется по времени, чтобы заказы "нагромождались в кучи" с промежутками между ними. Заключение Предлагаются разнообразные типы систем хранения небольших изделий. Лучше всего их классифицировать как статичные и динамичные, и по плотности хранения и по пропускной способности, практически любое изделие можно хранить эффективно и с достаточной производительностью. Прежде чем выбирать систему или машину, необходимо тщательно проанализировать свои потребности, как настоящие, так и будущие. 21 Системы по автоматическому размещению и перемещению Джеймс К. Олред Президент, компания «Eskay», г. Солт-Лейк-Сити, штат Юта Введение Системы по автоматическому размещению и перемещению (автоматизированные системы по размещению и перемещению) – это технология, которая позволяет улучшить поток материалов и управление на заводе и складе. Обеспечивается высокоточное, в реальном времени управление товарными запасами благодаря точной регистрации всех изделий по месту хранения и, в сущности, абсолютной физической защищенности материалов. Благодаря большой плотности хранения в часто неиспользуемом вертикальном пространстве, автоматизированные системы по размещению и перемещению освобождают большую площадь пола, обеспечивая большое увеличение производственных объемов без строительства новых зданий. Высокая плотность буферного хранения автоматизированных систем по размещению и перемещению позволяет размещать рабочие места или автоматические процессы ближе к буферным запасам, сокращая расстояние транспортировки полуфабрикатов и время выполнения заказа. Большая точность, защищенность и плотность хранения автоматизированных систем по размещению и перемещению часто позволяет использовать подход «точно в назначенное время» благодаря надежной и быстрой доставке каждого элемента из товарных запасов к его месту назначения. Автоматизированные системы по размещению и перемещению легко соединяются с рабочими местами с ручным режимом работы или с автоматическими процессами через конвейеры, автопогрузчики, робокары или транспортные тележки. Компьютерное управление автоматизированными системами по размещению и перемещению обычно напрямую соединено с корпоративной компьютерной системой, которая управляет производством, выполнением заказов и распределением – повышая эффективность этих систем благодаря точной, в реальном времени информации об имеющихся товарных запасах. Типы автоматизированных систем по размещению и перемещению Автоматизированная система по размещению и перемещению состоит из большого, передвигающегося по рельсам, похожего на робота транспортного средства, называемого машиной по размещению и перемещению. Эта машина работает в проходе между двумя стеллажными конструкциями, размещая и перемещая грузы (см. Рис. 21.1). Машина по размещению и перемещению управляется контроллером в конце прохода, который может быть автономным или связанным с компьютером системы, управляющим одной или несколькими машинами по размещению и перемещению, отслеживая все товарные запасы в системе. 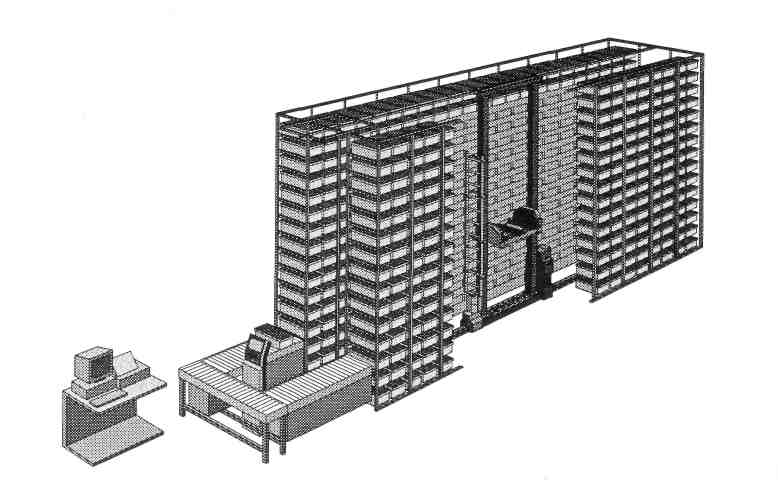 Рис. 21.1 Машина по размещению и перемещению работает между стеллажами хранения и получает команды от контроллера в конце прохода Обычно автоматизированные системы по размещению и перемещению делят на системы для единичных грузов и системы для легких грузов. Автоматизированная система по размещению и перемещению единичных грузов обрабатывает паллеты или контейнеры (Рис. 21.2), которые, как правило, весят 1000 фунтов и больше, с высотой от 15 до 100 футов. Автоматизированная система по размещению и перемещению легких грузов обрабатывает пластиковые или металлические лотки или отдельные коробки и обычно устанавливается в имеющемся здании, обычно не более 30 футов в высоту. Однако она может достигать и 50 футов в высоту. Здесь, как правило, обрабатываются грузы, которые весят 500 фунтов и меньше. У машины по размещению и перемещению легких грузов может быть механический манипулятор, вытаскивающий лотки из стеллажа на машину по размещению и перемещению. Как и у машин для единичных грузов, у них часто имеется подающий механизм (Рис. 21.3), доставляющий подъемную платформу в стеллаж, под груз, затем поднимая и перемещая его. 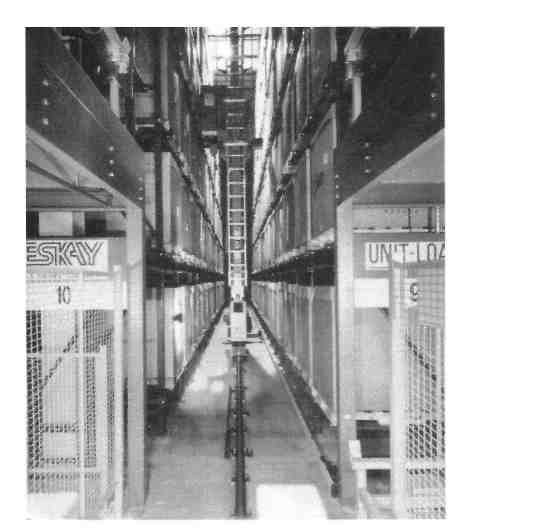 Рис. 21.2 Машина по размещению и перемещению единичных грузов работает в проходе и перемещает паллеты (компания «Gardetto») 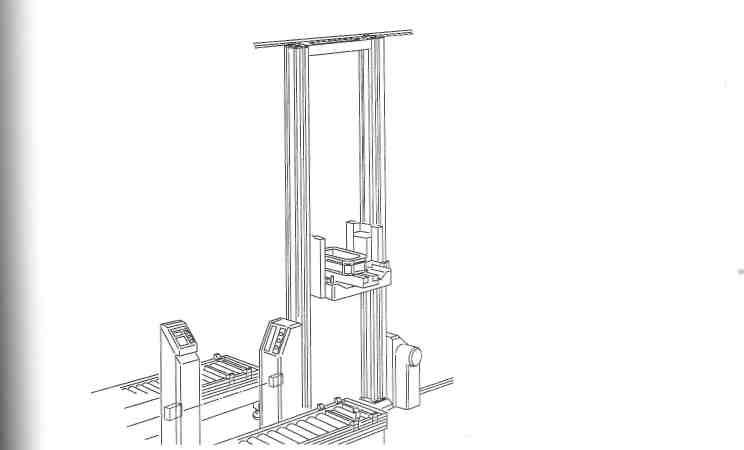 Рис. 21.3 Машина по размещению и перемещению легких грузов с выдвижной подъемной платформой Характеристики груза Много факторов влияет на проектирование автоматизированных систем по размещению и перемещению, но основной фактор – это сам груз. Наиболее важные характеристики груза – это его вес, опорная поверхность и высота, которые определяют размеры и крепость секций хранения. Если паллеты, лотки или коробки не подходят для хранения, или если используется груз с большим разнообразием размеров, то может быть трудно и дорого спроектировать стеллажную систему, в которой будут храниться все грузы. Лучшим решением может быть использование стандартных по размерам рабочих поддонов (на которые устанавливается по два поддона [паллеты] меньшего размера) или лотков. Рабочие поддоны или лотки обычно неотделимы от системы и могут потребоваться специальные устройства сбора, распределители, и оборудование для обработки пустых паллет или лотков. Качество паллет очень важно для успешной работы автоматизированных систем по размещению и перемещению. Незакрепленные или сломанные доски на дне, торчащие гвозди и разнообразие паллет по размерам могут препятствовать перемещению грузов в стеллажи и из стеллажей. Факторы проектирования стеллажей Стеллаж с проездом машины Этот тип обычно используется в автоматизированных системах по размещению и перемещению. Груз поддерживается по краям (Рис. 21.4). Подводной стол машины по размещению и перемещению подводится под груз и забирает его со стеллажа. Так как стеллажи проектируются для конкретной автоматизированной системы по размещению и перемещению, всегда необходимо проконсультироваться с поставщиком, чтобы он оказал содействие в компоновке стеллажей. Это нужно сделать потому, что у каждого поставщика машина по размещению и перемещению имеет уникальную габаритную высоту для самых низких и самых высоких грузов и допуски для груза и подводного стола в секции хранения. Пространство для выезда машины На обоих концах системы требуется пространство для выезда машины. В передней части оно определяется длиной машины по размещению и перемещению, которая должна частично выходить за стеллаж, чтобы отбирать и выгружать груз. В задней части участок для выезда – это длина машины по размещению и перемещению и выход за пределы последних стеллажных стоек, когда машина по размещению и перемещению обслуживает последние отсеки стеллажей.  Рис. 21.4 Основные свойства стеллажной системы с проездом машины Отдельно стоящий стеллаж и стеллаж, который поддерживает здание Большинство автоматизированных систем по размещению и перемещению построены в отдельно стоящих стеллажах (конструкциях, которые не поддерживают здание) и ниже 50 футов в высоту. Большинство систем, которые выше 60 футов, установлены в стеллажах, поддерживающих здание; очень мало систем, которые больше чем 100 футов в высоту, так как затраты на здание и системы после 100 футов быстро возрастают. Когда стеллажи поддерживают здание, то система стеллажей становится каркасом, поддерживающим настил крыши, боковую обшивку здания, системы кондиционирования, электропитания и противопожарной защиты. Сама стеллажная система объединена системой стяжек и распорок во всех направлениях, чтобы сформировать достаточно жесткую структуру, способную выдержать груз, а также ветер и снег. Стеллажные конструкции также отличаются друг от друга в соответствии с сейсмическими условиями места, в котором они построены. Машина по размещению и перемещению В то время как складские стеллажи – это производственное оборудование системы, машины по размещению и перемещению – это основные единицы обработки материалов. У них есть три направления движения: горизонтальное, вертикальное и возвратно-поступательное движение в стеллаж и из стеллажа. Рабочие скорости Сегодня системы могут достигать вертикальной скорости до 250 футов в минуту. Горизонтальная скорость современных машин по размещению и перемещению, как правило, будет от 300 до 800 футов в минуту. Скорость машины должна соответствовать высоте и длине системы, весу грузов и необходимой пропускной способности, так как применение приводов с более высокой скоростью (и более дорогие) может оказаться нерациональным в данном конкретном случае. Время цикла Американская промышленность по обработке материалов в разделе об автоматизированных системах по размещению и перемещению предлагает формулу для вычисления времени цикла для отдельных и двойных циклов. При двойном цикле, машина по размещению и перемещению забирает груз на рабочем месте, затем движется вдоль прохода и по стеллажу и размещает груз; затем извлекает другой груз и возвращается с ним на рабочее место. Пои отдельном (одинарном) цикле, машина по размещению и перемещению выполняет только одно действие (или отбирает или размещает груз), и затем возвращается на рабочее место. Поставщики автоматизированных систем по размещению и перемещению разработали компьютерные программы моделирования, в которые вводятся размеры системы и операционные параметры, наряду с рабочими характеристиками машины. С помощью генератора случайных чисел обычно выбираются разнообразные сочетания мест хранения, и программа вычисляет время выполнения двойных или отдельных циклов для этих выбранных мест хранения. Так как здесь более тщательно моделируется способ работы системы, то этот тип моделирования дает более точный результат, чем формула Американской промышленности по обработке материалов. Пропускная способность системы Общая пропускная способность системы – это не просто сумма операционных возможностей машин по размещению и перемещению. К факторам, влияющим на общую работу системы, относятся управленческие подходы, компоновка «входов»/»выходов» системы, цели системы и работа машины по размещению и перемещению. Требования к пропускной способности автоматизированной системы по размещению и перемещению часто бывают завышенными, что приводит к проектам, которые не подходят экономически и не соответствуют необходимому использованию. Необходимо точно подсчитывать скорость потока материалов, чтобы система не была чрезмерной или недостаточной. Автоматизированные системы по размещению и перемещению редко работают только на основе двойного цикла. На самом деле, реальные требования к пропускной способности могут выглядеть так: "20 размещений и 40 отборов заказов в час с 7:00 до 12:00; 120 отборов заказов и 40 размещений в час с 12:00 до 15:00; и 100 размещений и 60 отборов заказов в час с 15:00 до 23:30". Эти требования могут отражать действительные операции какого-нибудь объекта. Внимательное обдумывание того, как система должна работать для того, чтобы обслуживать объект – это наиболее важный первый шаг при разработке требований к работе системы, соответствующих нуждам завода или оптовой базы. «Входы»/»выходы» системы транспортировки Транспортное оборудование, взаимодействующее с автоматизированной системой по размещению и перемещению, зависит от размеров и веса материалов, типа контейнеров или паллет, а также от скорости и расстояния для перемещения. Оно состоит из конвейеров, транспортных тележек, автоматизированных управляемых транспортных средств, автопогрузчиков и ручных тележек. Система транспортировки взаимодействует с ответвлениями «входов» и «выходов» каждого прохода системы. Часто подгонка груза по форме выполняется там, откуда груз отправляется к системе по размещению и перемещению, затем груз доставляется к ней и в порядке очереди машина по размещению и перемещению складирует его. |